ESTIMACIÓN DE IRREGULARIDADES EN PAVIMENTOS MEDIANTE TÉCNICAS DE PROCESAMIENTO DIGITAL DE IMÁGENES
Juan Pablo Escobar-Arenas1, Luis David Flórez-Pareja2, David Stephen Fernandez-Mc Cann3.
1Ingeniero Electrónico, Grupo de Investigación GEPAR, Universidad de Antioquia, juanp.escobar@udea.edu.co
2Ingeniero Electrónico, Grupo de Investigación GEPAR, Universidad de Antioquia, ldavid.florez@udea.edu.co
3Docente Investigador, Grupo de Investigación GEPAR, Universidad de Antioquia, david.fernandez@udea.edu.co
RESUMEN
Las vías de transporte cumplen un papel fundamental dentro de la comunicación de un país, algunas de ellas están pavimentadas y constituidas por diversos materiales que con el paso del tiempo pueden presentar diferentes tipos de irregularidades. En el siguiente documento se pretende dar una solución para estimar el daño ocasionado por estas irregularidades, específicamente: baches, grietas y pieles de cocodrilo, que son comunes en vías con constante deterioro. Con este objetivo, se realiza un tratamiento desde la perspectiva del procesamiento digital de imágenes usando para ello técnicas de transformación de perspectiva, umbrales, filtros, entre otros, con el propósito de estimar el área equivalente afectada que varía según la irregularidad, evaluando la veracidad del resultado por medio del método intersección sobre unión (IOU), obteniéndose valores de exactitud o precisión de 0.69, 0.87, 0.79 para deterioros como: piel de cocodrilo, bache y grietas considerados en este documento.
Palabras clave: Procesamiento digital de imágenes; intersección sobre unión; irregularidades en pavimentos; evaluación de pavimentos

Recibido: 12 de diciembre de 2022. Aceptado: 13 de febrero de 2023
Received: December 12, 2022. Accepted: February 13, 2023
ESTIMATION OF IRREGULARITIES IN PAVEMENTS USING DIGITAL IMAGE PROCESSING TECHNIQUES
ABSTRACT
Transportation roads play a fundamental role in the communication of a country, some of them are paved and made of different materials that over time may present different types of irregularities. The following document aims to provide a solution to estimate the damage caused by these irregularities, specifically: potholes, cracks and crocodile skins, which are common in roads with constant deterioration. With this objective, a treatment is carried out from the perspective of digital image processing using perspective transformation techniques, thresholds, filters, among others, with the purpose of estimating the equivalent affected area that varies according to the irregularity, evaluating the veracity of the result by means of the intersection over union (IOU) method, obtaining accuracy or precision values of 0.69, 0.87, 0.79 for deteriorations such as: crocodile skin, pothole and cracks considered in this document.
Keywords: Digital image processing; intersection over union; pavement irregularities; pavement evaluation
Cómo citar este artículo: Escobar-Arenas, J. P., Flórez-Pareja, L. D., Fernandez-Mc Cann,
D. S. (2023). “Estimación de irregularidades en pavimentos mediante técnicas de procesamiento digital de
imágenes” Revista Politécnica, 19(37), 20-28.
https://doi.org/10.33571/rpolitec.v19n37a2
- 1. INTRODUCCIÓN
- 2. TRABAJOS RELACIONADOS
- 3. MATERIALES Y MÉTODOS
- 5. DISCUSIÓN
- 6. CONCLUSIONES
- 7. REFERENCIAS BIBLIOGRÁFICAS
La condición de las carreteras es un aspecto importante para el desarrollo de un país, indica el nivel de desarrollo y ha sido adoptado como criterio de calificación económico por el Banco Mundial [1]. En cualquier país es importante tener una red vial adecuada y de suma calidad, y esto se realiza por medio de la pavimentación correcta en los diferentes tramos de la vía. El pavimento de una calle o autopista es una estructura compuesta por un conjunto de capas de materiales procesados en el suelo, cuya función es distribuir la carga de vehículos al subsuelo y permitir el tránsito constante. La estructura del pavimento debe proporcionar una superficie de calidad aceptable para la circulación de vehículos, una resistencia al deslizamiento adecuada, un menor nivel de ruido, una resistencia estructural impermeable y un ciclo de vida largo con bajo costo de mantenimiento [2]. Sin embargo, las fallas son habituales debido a varios factores.
Las fallas que se pueden encontrar en un tramo vial son de alguna forma diversas, pero entre las más comunes se destaca: las grietas, los baches y pieles de cocodrilo. Debido a la degradación constante de los diferentes tipos de fallas, estas deben ser detectadas y reparadas lo antes posible. La tarea de registrar defectos y depresiones en el pavimento siempre ha sido crucial para adoptar una estrategia precisa para el mantenimiento y reparación de las carreteras. Sin embargo, la medición manual es una tarea costosa tanto en tiempo como en recursos [2].
Con lo anterior en mente, este trabajo va orientado, bajo el concepto de un estudio, de cómo detectar estas fallas (grietas, baches y piel de cocodrilo) por medio del procesamiento digital de imágenes con el fin de estimar características (área, perímetro, diámetro equivalente, entre otros) que se pueden extraer de la fisura o falla en específico, culminando con el desarrollo de un software para la representación y obtención de los respectivos resultados.
De esta manera el trabajo, a partir de la introducción, se divide en trabajo relacionados (textos relacionados con el estudio del tema), materiales y métodos (para dar una solución al problema), resultados (evidencia de la aplicación de los diferentes métodos y sus bondades) y finalmente, discusión y conclusiones (debate sobre resultados, mejoras y líneas futuras).
Varias aproximaciones basadas en técnicas de procesamiento digital de imágenes clásico, machine learning y deep learning han sido propuestas por diversos autores para la detección y cuantificación de irregularidades sobre pavimento. En esta sección se da un breve resumen de algunas de ellas.
Tello-Cifuentes et. al [3], proponen un algoritmo para clasificación y evaluación de irregularidades sobre pavimentos (equivalentes a las tratadas en este trabajo) usando técnicas de fotogrametría y redes neuronales. En primer lugar, se capturan las imágenes de alta resolución y como segunda etapa se aplican técnicas de preprocesamiento a las imágenes, tales como: corrección geométrica, mejora de contraste y compensación en cambios de iluminación, aplicación de la transformada Beamlet para la detección de líneas y curvas, y aplicación de operaciones morfológicas, como tercer paso, se aplica una etapa de extracción de características que consiste en calcular los momentos invariantes de la imagen del punto anterior. Finalmente, con estos descriptores se da paso a la implementación de un algoritmo de clasificación tipo perceptrón multicapa (MLP). Para la etapa de evaluación de nivel de deterioro se halla el porcentaje de área afectada y de acuerdo con este se clasifica en deterioro ligero, medio o alto. En la etapa de clasificación se obtuvo un porcentaje del 96% (accuracy), del 96.97% (precision), del 93.33% (recall) y un índice Kappa de 0.936.
Buchinger & Silva [4], proponen dos algoritmos: uno para segmentación de carretera y otro para detección de anomalías en carretera. El primero de ellos se realiza usando un algoritmo Watershed condicionado para extraer la región de interés e ignorar el entorno de la imagen en perspectiva. El segundo algoritmo para detección de anomalías asume que las irregularidades son más oscuras que el resto del pavimento y se aplica para su identificación una técnica de segmentación basada en desviación estándar e intervalos de confianza extraídos del histograma de la imagen, considerando este como una distribución de probabilidad gaussiana. Luego de está segmentación se aplican operaciones morfológicas para mejorar los resultados. La métrica de desempeño usada para evaluar la calidad del algoritmo consiste en lo siguiente: la segmentación se considera buena cuando al menos una cuarta parte de toda la carretera queda segmentada (incluso cuando parte del entorno también quede segmentado) y la segmentación es deficiente cuando menos de una cuarta parte de toda la carretera queda segmentada. De acuerdo con lo anterior se reporta que la calidad de la segmentación fue buena en el 92.14% de las imágenes analizadas.
Koch & Brilakis [5], proponen la siguiente metodología para detección y cuantificación de baches: segmentación de la región de interés por medio de la técnica de binarización por triángulo, luego, basado en las propiedades geométricas de la región detectada se aproxima la forma del bache (que debe ser aproximadamente elíptico) y finalmente, se realiza la extracción de textura de la región afectada y el fondo para una posterior comparación que permita distinguir entre falsos candidatos (parches de reparación, manchas y decoloración) y baches reales. Está aproximación logra para una tarea de clasificación un porcentaje de aciertos (accuracy) del 86%, una precisión (precision) total del 82% y una sensibilidad (recall) de 93.33 %.
Cubero-Fernandez et al [6], proponen un algoritmo para detección temprana de grietas en carreteras con el objetivo de minimizar costos de reparación. Para lograr este objetivo, en primer lugar, se hace un preprocesamiento de las imágenes capturadas que consiste en lo siguiente: transformación logarítmica de la imagen de entrada, aplicación de un filtro bilateral, detección de bordes por el método de Canny y aplicación de operaciones morfológicas. Hasta este punto se tiene una imagen binarizada que resalta el defecto en la imagen de entrada. Como tercer paso, se hallan las proyecciones verticales y horizontales de la imagen anterior con el fin de extraer vectores de características para alimentar un sistema de clasificación, consistente en un árbol de decisión, que obtuvo un porcentaje de aciertos (accuracy) del 88% en identificación de grietas y no grietas.
Por otro lado, Escalona et al [7], proponen un enfoque basado en deep learning para detección automática de grietas sobre pavimento, utilizando una variación de la arquitectura de una red neuronal completamente convolucional llamada U-Net. La red neuronal fue entrenada sobre dos conjuntos de datos de acceso libre: CFD y AigleRN. Con esta aproximación se obtiene una precisión (precision) de 97.31% ± 0.28, una sensibilidad (recall) del 94.28% ± 0.51 y un F1 score de 95.75% ± 0.22.
El proceso de identificación de irregularidades en el pavimento busca encontrar baches, grietas y piel de cocodrilo en una región de interés, así como cuantificar en términos de área el tamaño de la irregularidad. Con esto se busca planificar una intervención con fines de reparación de la zona afectada.
Desde el punto de vista de las imágenes el procedimiento propuesto se realiza ejecutando los siguientes pasos:
Paso 1: Se toma la imagen, normalmente en perspectiva, y de ella se selecciona la región que se quiere evaluar f(x,y).
Paso 2: Mediante un testigo en la imagen se obtiene la métrica contenida en ella, es decir, cuántos píxeles equivalen a un milímetro. ∀P(x,y) ∃ M | [M] → mm2.
Paso 3: La región es modificada en perspectiva para obtener su representación en un espacio rectangular T[f(x, y)] →f'(x, y).
Paso 4: Se obtiene los niveles de gris de la imagen para proceder a su tratamiento: ∀ f'(x, y) ∃ [r, g, b]→g.
Paso 5: A continuación, se hace un filtro promedio con el fin de eliminar las irregularidades extremas de la imagen y así homogeneizar su textura:
![]()
Paso 6: Debido a la irregularidad de la iluminación la imagen anterior es binarizada utilizando el algoritmo del triángulo [8] para obtener la máscara:

Paso 7: Se realiza el cálculo del área de las grietas, los baches y piel de cocodrilo:

Paso 8: De la imagen anterior se extraen los bordes mediante el método Canny [9]:
 con el fin de resaltarla en las imágenes originales.
con el fin de resaltarla en las imágenes originales.
Paso 9: Los bordes obtenidos por Canny son proyectados


 sobre las imágenes originales para ilustrar donde se encuentran los baches, las grietas y piel de cocodrilo
sobre las imágenes originales para ilustrar donde se encuentran los baches, las grietas y piel de cocodrilo
 .
.
Paso 10: Los contornos que delimiten baches contienen áreas de pixeles inscritas en un contorno cerrado que son homogéneamente rellenadas mediante técnicas como la reconstrucción morfológica.
Paso 11: Al final se muestra la imagen con las grietas, baches o piel de cocodrilo superpuesta sobre la original k(x, y) y se genera un archivo de datos con la información de las áreas a cubrir.
En la Figura 1 se muestra el diagrama de flujo con los resultados esperados.
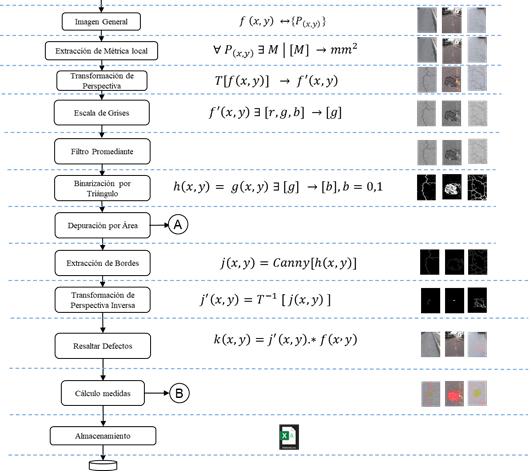
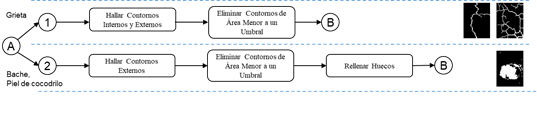
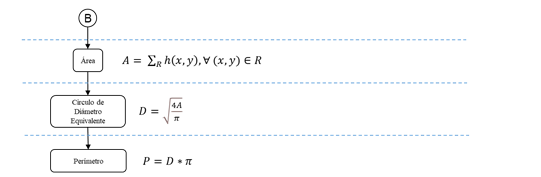
Figura 1. Diagrama de flujo con los pasos realizados en el método propuesto.
- 4. RESULTADOS
En esta sección se analiza por medio del concepto de intersección sobre unión la precisión que se obtiene al comparar dos imágenes concernientes a una máscara real y una máscara de predicción para la identificación de irregularidades en pavimentos como: baches, grietas y piel de cocodrilo.
La intersección sobre unión es un término que, para el propósito de este artículo, se define como el grado de superposición de dos objetos, en nuestro caso dos imágenes. Para conocer el grado de superposición se realiza la comparación con una máscara real y una máscara de predicción, como se menciona anteriormente, y por medio de un algoritmo se determina esta métrica en un número real que se encuentra en el rango de 0 a 1, siendo 1 el resultado óptimo o ideal. Matemáticamente se pueden interpretar el proceso del cálculo como se explica en las siguientes figuras:
Si se asumen dos imágenes puestas en el plano coordenado como en la Figura 2, de tal forma que se intersecan:
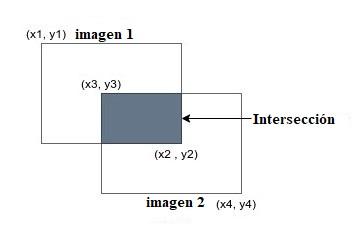
Figura 2. Áreas de intersección de dos imágenes.
Y además se asumen la mismas dos imágenes en el plano coordenado como en la Figura 3, pero considerandos sus uniones:
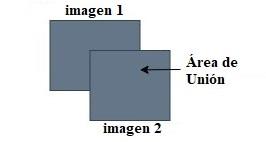
Figura 3. Áreas de unión de dos imágenes.
La intersección sobre unión queda definida matemáticamente como:

Y de manera gráfica, como lo presenta la Figura 4:
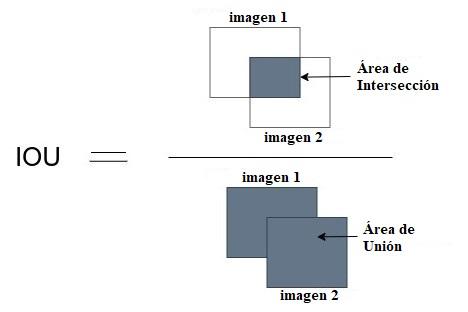
Figura 4. Definición gráfica de Intersección sobre Unión.
Para evaluar el desempeño de la metodología propuesta se realizó la captura de 5 imágenes de pavimento que contienen los tres tipos de deterioro analizados a lo largo de este trabajo: grietas, baches y piel de cocodrilo. A estas imágenes se les extrajo de manera manual una máscara binaria que resalta el área de afectación y que posteriormente se compararon con las máscaras binarias de predicción arrojadas por el algoritmo. Dicha comparación se realizó con la métrica de intersección sobre unión explicada anteriormente. Los resultados por cada imagen se muestran en la tabla a continuación y, además, se deja una imagen con el comparativo entre la máscara de predicción y la máscara real o etiquetada (Figura 5):
Tabla 1. Tipos de letra, justificación y tamaño
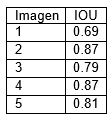
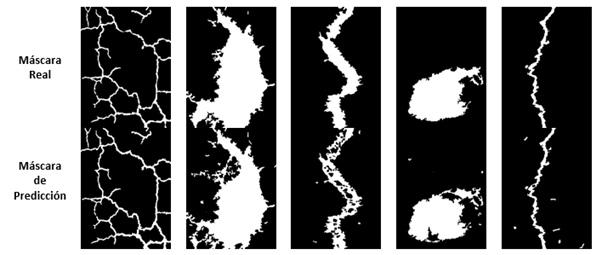
Figura 5. Máscaras reales y de predicción para cada una de las imágenes evaluadas.
Puede observarse de la figura anterior y contrastarse con los resultados de la tabla que la máscara de predicción presenta en general varias diferencias respecto a la máscara real. Lo anterior se debe a regiones que, no siendo imperfección, son etiquetadas como tal: este es el caso de pequeñas rocas incrustadas en el pavimento o dentro de la imperfección misma que debido a su color más oscuro respecto al pavimento sano quedan clasificadas erróneamente. Factores como la luz o la sombra en el momento de capturar la imagen pueden también influir en los resultados, lo cual amerita, que la solución algorítmica sea ejecutada en condiciones de luminosidad adecuadas (luz diurna con condiciones de humedad favorables). Finalmente, es de aclarar que procesos en el algoritmo como la implementación de operaciones morfológicas y las diversas transformaciones de perspectiva pueden deformar los píxeles dentro de la imagen y hacer que las dos máscaras no coincidan en su totalidad.
La metodología propuesta en este trabajo emplea únicamente técnicas clásicas de procesamiento digital de imágenes lo que simplifica el trabajo en gran medida, demandando un tiempo de desarrollo menor ya que se evitan etapas comunes y tediosas de un flujo de machine learning o deep learning que según lo expuesto en [3], [6] y [7] consta de tareas como la adquisición de las imágenes para formar el conjunto de entrenamiento, su etiquetado, elección del modelo que mejor se ajusta al problema y a los datos, ajuste de hiperparámetros, entre otros. Además, debe tenerse en cuenta que por la complejidad algorítmica de los modelos de machine learning y deep learning es necesario emplear recursos computacionales mayores con el fin de llevar a cabo el entrenamiento y puesta en producción de los modelos generados. Lo anterior sugiere un comportamiento bastante deseable desde el punto de vista computacional ya que el algoritmo es mucho más ligero, favoreciendo la velocidad de ejecución y el consumo de recursos sin sacrificar la calidad de los resultados obtenidos. Esto lo hace propicio de ser incorporado en sistemas que requieren de una respuesta rápida y que disponen de recursos de cómputo limitados como los sistemas embebidos.
Otro aspecto para resaltar es que al ser una técnica netamente analítica que no requiere calibrar un modelo a partir de datos no presenta el inconveniente de reducción en su rendimiento por la variabilidad que puedan presentar los datos a futuro, es decir, no hay una pérdida de generalización como normalmente sucede en sistemas de machine learning y deep learning a medida que avanza el tiempo, por lo que no es necesario definir estrategias posteriores de reentrenamiento del algoritmo.
Finalmente, otro de los aspectos a resaltar, es que a diferencia de [4] y [5], este algoritmo está en la capacidad de cuantificar y llevar un histórico de información en unidades reales de área de las distintas afectaciones que pueda llegar a presentar el pavimento, lo que lo hace especialmente práctico en el uso de escenarios reales en los que se busca medir el nivel de afectación en las vías de transporte para tomar medidas correctivas al respecto.
En el presente trabajo se desarrolló un estudio relacionado con la detección de irregularidades en pavimento clasificadas según un patrón de formación como: baches, grietas y piel de cocodrilo. Es importante destacar que la utilización de herramientas intrínsecas sobre procesamiento digital de imágenes involucradas para la implementación y solución del problema es de apoyo fundamental debido a que con estas herramientas se logró una estimación y determinación del área afectada dentro del entorno donde hacían partícipes la irregularidad dentro del pavimento y otros factores medioambientales que influyen alrededor.
Como se evidencia, el parámetro a cuantificar el desempeño en cuanto a la estimación de la irregularidad es la intersección sobre unión, la cual arroja resultados aceptables para la determinación de características como el diámetro equivalente de la irregularidad que es plasmado en la imagen original dando una noción de la superficie comprometida. Esto es de gran apoyo y respaldo en el ámbito de mantenimiento y remodelación de vías ya que con esta aproximación se puede estimar y cuantificar la afectación y tomar las medidas de corrección necesarias al respecto.
Finalmente, como trabajo futuro se puede realizar diferentes modificaciones y derivaciones basados en algoritmos de machine learning y deep learning para una clasificación exhaustiva del problema, en conjunto con la utilización de herramientas de procesamiento digital de imágenes más robustas (por ejemplo, experimentar con espacios de colores que sean menos sensibles a cambios de luminosidad), de tal manera que se garantice dentro de los resultados esperados una mejor aproximación y exactitud del problema evaluado bajo la misma métrica (IOU). Además, dentro de los desafíos que involucran una mejora está el desarrollo de un entorno de toma de muestras más controlado, teniendo para ello un montaje en la captura de la imagen más efectivo y competitivo, permitiendo así un banco de imágenes de mayor volumen con diferentes eventualidades climáticas dentro del pavimento, para garantizar una independencia del el algoritmo a la hora de determinar las respectivas irregularidades en las vías donde el sistema se vaya a implementar.
[1] S. D. Indicators, “Road Infrastructure and Economic Development,” 1992.
[2] R. Huincalef, G. Urrutia, G. Ingravallo, and D. C. Martínez, “Recognition of Surface Irregularities on Roads: a machine learning approach on 3D models,” 2018.
[3] L. Tello-Cifuentes, M. Aguirre-Sánchez, J. P. Díaz-Paz, and F. Hernández, “Evaluación de daños en pavimento flexible usando fotogrametría terrestre y redes neuronales,” TecnoLógicas, vol. 24, no. 50, Jan. 2021, doi: 10.22430/22565337.1686.
[4] D. Buchinger and A. G. Silva, “Anomalies detection in asphalt pavements: a morphological image processing approach,” Revista Brasileira de Computação Aplicada, vol. 6, no. 1, Apr. 2014, doi: 10.5335/rbca.2014.3661.
[5] C. Koch and I. Brilakis, “Pothole detection in asphalt pavement images,” Advanced Engineering Informatics, vol. 25, no. 3, Aug. 2011, doi: 10.1016/j.aei.2011.01.002.
[6] A. Cubero-Fernandez, Fco. J. Rodriguez-Lozano, R. Villatoro, J. Olivares, and J. M. Palomares, “Efficient pavement crack detection and classification,” EURASIP Journal on Image and Video Processing, vol. 2017, no. 1, Dec. 2017, doi: 10.1186/s13640-017-0187-0.
[7] U. Escalona, F. Arce, E. Zamora, and J. H. Sossa Azuela, “Fully Convolutional Networks for Automatic Pavement Crack Segmentation,” Computación y Sistemas, vol. 23, no. 2, Jun. 2019, doi: 10.13053/cys-23-2-3047.
[8] W. A. Mustafa, H. Aziz, W. Khairunizam, Z. Ibrahim, A. B. Shahriman, and Z. M. Razlan, “Review of Different Binarization Approaches on Degraded Document Images,” in 2018 International Conference on Computational Approach in Smart Systems Design and Applications, ICASSDA 2018, 2018.
[9] A. Vyas, S. Yu, and J. Paik, “Fundamentals of digital image processing,” in Signals and Communication Technology, 2018.