1. INTRODUCCIÓN
Identificar los diferentes movimientos y posturas del cuerpo humano se ha convertido en una necesidad tecnológica durante las dos últimas décadas, gracias a que la individualización de dicho movimiento impacta directamente áreas como la medicina, el deporte y la vigilancia, debido al carácter particular que tiene la cadencia humana. En términos generales, para analizar el movimiento humano es necesario identificar su patrón o dinámica, lo que obliga el uso de sensores que lo puedan captar. Los cuales pueden ser, desde cámaras digitales que identifiquen los rasgos y movimientos, hasta elementos adaptados al cuerpo del sujeto que proporcionan una referencia óptica o espacial. Técnicamente los sensores ópticos han tenido una mayor exactitud al momento de proporcionar la posición de un sujeto; sin embargo, presenta desafíos al momento de su uso, como la necesidad de tener condiciones ambientales controladas y personal entrenado en su manejo, causando que la adquisición de datos de movimiento se torne difícil y evitando un desarrollo generalizado en esta área de trabajo, limitándolo solo a instituciones y laboratorios que tengan una capacidad instalada con dichos dispositivos.
Dentro de las posibles soluciones a dicho problema, se tiene el uso del Kinect de Microsoft, el cual permite la captura del movimiento. Si bien, este dispositivo no estaba diseñado para aplicaciones en la medicina o de alta precisión, ya que proviene del área de los videojuegos, si puede proporcionar datos útiles para la ubicación espacial de un sujeto, ya que tiene la capacidad de encontrar la posición de las articulaciones en un espacio definido, sin la necesidad del uso de sensores adheridos al cuerpo, con menores requerimientos técnicos, y teniendo la ventaja de ser un sistema de libre acceso y bajo costo [1].
Gracias a la versatilidad que ha proporcionado el Kinect de Microsoft para la captura de movimiento, diferentes investigadores han propuesto trabajos basados en dicha tecnología. En cuanto al uso del Kinect existen dos líneas de trabajo, la primera es aquella en donde se utiliza los datos de la posición en el espacio para identificar patrones en movimientos, como puede ser el Parkinson [2], o en rehabilitación física después de una lesión [3]. Y una segunda línea, se enfoca en identificar y mejorar la exactitud y precisión de los datos de movimiento que proporciona el Kinect [1]. Por otro lado, para poder identificar patrones o dinámicas en el movimiento humano, es necesario generar metodologías que proporcionen una clasificación de forma automática, que de lo contrario, se tendrá que acudir a expertos que hagan la interpretación de dichos datos, corriendo el riesgo de caer en sesgos, y que además para el análisis de grandes volúmenes de datos la capacidad de lectura para un persona se hace difícil, haciéndose necesario acudir a diferentes técnicas computacionales que permitan identificar patrones en los datos
Dentro de los métodos tradicionales en el reconocimiento de patrones para el movimiento, se tienen dos elementos importantes que son la caracterización de los datos y su clasificación, en donde para el primer procedimiento se busca identificar una variable o rasgo común dentro del grupo de datos, y para el segundo se toma dicha variable y se genera una clasificación. Encontrando en la literatura una gran cantidad de trabajos en donde por ejemplo se enfocan en determinar la posición de un sujeto, por medio de plantear relaciones geométricas entre segmentos corporales [4,5,6,7], o la construcción de histogramas con las posiciones espaciales de los marcadores [8]. Así mismo, se han empleado enfoques dinámicos [9,10,11], en donde se incluyen características del movimiento como la velocidad, aceleración y posición del cuerpo.
Si bien, estos métodos logran una caracterización, por lo general presentan problemas al comparar diferentes trayectorias, ya que se requiere puntos de referencia común para cada una de los movimientos o sujetos y así poder ser comparados. Lo que no sucede en la práctica, en donde se tienen diferentes marcos de referencia y tiempos de ejecución, generando que las soluciones encontradas en la literatura hagan poco énfasis en las propiedades cinemáticas en la ejecución de la trayectoria [12]. Para dar solución a lo anterior, en el estado del arte se puede encontrar el marco móvil de Frenet Serret como herramienta para la reconstrucción de la trayectoria de un movimiento, esto gracias a que este marco permite describir la dinámica mediante la generación de una referencia móvil basada en tres vectores unitarios, los cuales cambian de posición a lo largo del movimiento, que para este caso puede ser el recorrido de un marcador adherido al cuerpo del sujeto o en su defecto una articulación.
Teniendo en cuenta lo anterior, algunos autores, se han acercado a la reconstrucción del movimiento de diferentes partes del cuerpo mediante dicho marco, como por ejemplo la descripción de la trayectoria que puede tomar la mano [13,14,15], o la reconstrucción del movimiento del sujeto, tomando un punto de referencia o marcador característico en su cuerpo, utilizándolo como indicador de la trayectoria y generando la separación de los movimientos en tramos [16,17]. Sin embargo, en el estado del arte evaluado no se encuentra un reporte del uso del marco de Frenet Serret en movimientos complejos y que además incluya la totalidad de sensores marcadores del movimiento sobre el cuerpo de un sujeto ni la totalidad de variables que proporciona el marco.
Bajo este panorama, en este trabajo se pretende evaluar la capacidad descriptiva de los datos proporcionados por el marco de Frenet - Serret tomando los vectores, tangencial, normal y binormal, y la razón de cambio de dichos vectores, que son la curvatura y el torsor, formando un descriptor del movimiento que incluye la presencia de todos los marcadores que están sobre el sujeto, diferenciándose así de los trabajos propuestos en el estado del arte, en dónde hacen de un uso parcial de los parámetros del marco y de las zona de cuerpo. Adicionalmente, se pretende evaluar la capacidad discriminante que tienen los datos proporcionados por el Kinect mediante un comparativo con datos que provienen de marcadores ópticos, tomando como referencia movimientos usados en rehabilitación física.
2. MATERIALES Y MÉTODO
2.1. Marco de Frenet Serret
La descripción del movimiento de un objeto como el cuerpo humano se ha planteado tradicionalmente a partir de funciones que modelen la posición, velocidad y aceleración, o adquiriendo la ubicación espacial respecto a un marco de referencia, donde se obtiene una nube de puntos la cual identifica la posición del sujeto en el tiempo; siendo esta última metodología, la más usual para determinar la dinámica del cuerpo. Si bien existen herramientas que proporcionan las coordenadas de las partes corporales, es necesario tener referencias que permitan identificar las diferencias y similitudes de un movimiento respecto a otros sujetos. Siendo difícil cuando se trabaja bajo un marco de referencia inercial ya que cada sujeto debido a sus condiciones morfológicas tiene diferentes características, así ejecute el mismo movimiento.
Sin embargo, dicho problema se soluciona si se plantea un marco de referencia móvil el cual pueda ser comparado entre diferentes sujetos o movimientos. En este sentido, el marco de Frenet Serret el cual describe el movimiento de un objeto, puede servir de herramienta matemática para la reconstrucción de una trayectoria, gracias a que el recorrido de un marcador ubicado sobre el cuerpo de un sujeto se puede asociar a una curva que se forma en el espacio, teniendo como ventaja que dicho marco o punto de muestreo proporciona un sistema de referencia móvil y absoluto, lo que genera que al momento de comparar dos movimientos no se tenga marcos de referencia relativos.
Para el determinar dicho marco es necesario definir
tres vectores que describirán el movimiento, el primer vector es uno que va
tangencial ![]() a la curva, o para este caso a la trayectoria
del marcador, un segundo vector que va normal
a la curva, o para este caso a la trayectoria
del marcador, un segundo vector que va normal ![]() al vector tangencial, describiendo
el movimiento sobre un plano; además, se determina que tan rápido cambian de la
posición los vectores tangente y normal por medio de la curvatura (k). Si el movimiento que se desea evaluar es en el
espacio, lo que se requiere es un tercer vector ortogonal al plano formado por
los vectores tangencial y normal, este se conoce comúnmente como el vector
binormal
al vector tangencial, describiendo
el movimiento sobre un plano; además, se determina que tan rápido cambian de la
posición los vectores tangente y normal por medio de la curvatura (k). Si el movimiento que se desea evaluar es en el
espacio, lo que se requiere es un tercer vector ortogonal al plano formado por
los vectores tangencial y normal, este se conoce comúnmente como el vector
binormal ![]() , formando una base ortogonal con los dos
primeros vectores descritos. Igualmente, se puede tener un análogo a la
curvatura, el cual describe qué tan rápido cambia de posición el plano, o en
términos generales cuánto cambia la curva, siendo este la torsión
, formando una base ortogonal con los dos
primeros vectores descritos. Igualmente, se puede tener un análogo a la
curvatura, el cual describe qué tan rápido cambia de posición el plano, o en
términos generales cuánto cambia la curva, siendo este la torsión ![]() .
.
Basado en lo anterior, el marco de Frenet Serret se
representa paramétricamente como una curva en el espacio que describe un
conjunto de puntos que pertenecen al lugar geométrico definido por tres
funciones ![]() , en términos de un parámetro t. Definiendo
una curva parametrizada
, en términos de un parámetro t. Definiendo
una curva parametrizada ![]() continua en el espacio:
continua en el espacio:
![]()
Así mismo, los valores de los vectores tangencial ![]() , normal
, normal ![]() , y binomial
, y binomial ![]() , se pueden
definir en función de la curva α(t) mediante las Ecuaciones 1, 2 y 3.
, se pueden
definir en función de la curva α(t) mediante las Ecuaciones 1, 2 y 3.
![]()
![]()
![]()
Además, si α(t) es una curva regular parametrizada y sean α'(t), α''(t), α'''(t) las derivadas primera, segunda y tercera, respectivamente, de la curva α, se puede definir las funciones curvatura y torsor, según las ecuaciones 4 y 5, los cuales se interpretan como el cambio de dirección del vector tangente para la curvatura, y el cambio de dirección del vector binormal para la torsor.
![]()
![]()
2.2. Base de datos
La base de datos de referencia la proporciona el laboratorio de análisis del movimiento de medicina deportiva integrada (ISMMAL) [18]. La cual está compuesta por 10 movimientos trabajados en rehabilitación física, ejecutados por 10 sujetos diferentes, para conformar un total de 100 movimientos, cada uno de los cuales tiene diez repeticiones, Las posiciones espaciales son obtenidos mediante el Kinect, con un registro de la posición a 30 cuadros por segundo y el sistema de captura de movimiento Vicon cada 100 cuadros por segundo, en donde el Kinect proporciona 22 puntos de registro de la posición o marcadores los cuales coinciden en su mayoría con la ubicación de las articulaciones, mientras que Vicon 39, cada uno de los movimientos se presentan con una ejecución de forma correcta e incorrecta, conformando un total de 200 movimientos.
2.3. Metodología
Para determinar las variables proporcionadas por el marco de Frenet – Serret se toman los datos de las posiciones X, Y, y Z de cada uno de los marcadores presentes en los sujetos, tanto para Kinect como Vicon, según se muestra en las Fig. 1 y 2. Como se puede evidenciar estas dos tecnologías tienen un número diferente de marcadores, lo que exige que su posición dentro del sujeto sea diferente, evitando que estas dos tecnologías sean comparadas directamente. Además, la ubicación de las coordenadas cartesianas en la tecnología Vicon tiene un punto fijo de referencia externo al sujeto, y la del Kinect es móvil, ya que su referencia es respecto al marcador uno, el cual está ubicado al nivel de la cintura, como se muestra en la Fig. 1.

Fig. 1. Posición marcadores Kinect.
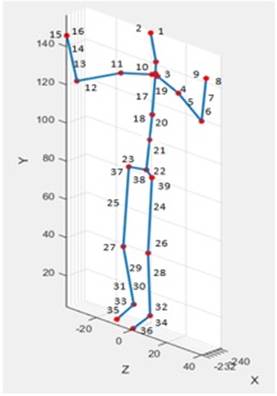
Fig. 2. Posición marcadores Vicon.
Si bien dentro de la base de datos se tienen diez sujetos ejecutando los movimientos, solo se tomó como referencia el uno, para los movimientos: sentadilla profunda (m1), sobrepaso de obstáculo (m2), paso adelante (m3), paso lateral (m4), pasar de estar sentado a parado (m5), levantar pierna derecha (m6), abducción de hombro (m7), extensión de hombro (m8), rotación externa interna de hombro(m9), levantar brazo derecho (m10). Luego, se procede a normalizar los datos de las posiciones X, Y, y Z, para cada uno de los marcadores del sujeto, por medio de la herramienta Normalice del Software Matlab 2020 a, esta normalización está basada en el estadístico z-score. Posteriormente procede a calcular los vectores Tangencial, Normal y Binormal, y los parámetros de Curvatura y Torsión, tomando como referencia las ecuaciones 1,2,3,4 y 5. Del conjunto de estos, se obtendrá por cada movimiento una matriz que representará la dinámica por medio del marco móvil.
Ejemplificando lo anterior, se puede decir que, si la
grabación de un movimiento cualquiera tiene cien cuadros o datos de muestreo,
se verán reflejados en la obtención cien coordenadas espaciales, para cada uno
de los marcadores del sujeto, lo cual servirá para el cálculo de los valores
del marco móvil de Frenet Serret, obteniendo un tamaño de vector tangencial,
normal, binomial, curvatura y torsión, de 99 datos. Esto se verá reflejado en
la conformación de la matriz de atributos del movimiento ![]() , en donde
por cada marco se generan tres vectores unitarios y dos escalares por marco, en
donde los vectores tienen tres coordenadas espaciales, como se muestra a
continuación.
, en donde
por cada marco se generan tres vectores unitarios y dos escalares por marco, en
donde los vectores tienen tres coordenadas espaciales, como se muestra a
continuación.
![]()
En donde, ![]() , son componentes del vector
columna tangencial,
, son componentes del vector
columna tangencial, ![]() , componentes del vector columna normal,
, componentes del vector columna normal, ![]() , componentes
del vector columna binormal y finalmente los valores de los vectores columna
curvatura y torsión
, componentes
del vector columna binormal y finalmente los valores de los vectores columna
curvatura y torsión ![]() , con n como el número de marcadores que posee
el sujeto. Con esto se conforma una matriz de atributos con un número de
columnas que depende de la cantidad de marcadores, el cual será multiplicado
por el número de componentes espaciales y vectores, en donde para el caso de
los datos Vicon se generan 429 columnas y para el Kinect 242. El número de
filas depende de la cantidad de cuadros por minuto que contenga el movimiento.
lo que se vería reflejado en el número de marcos móviles de referencia. Para
el cálculo de estos componentes se utilizó el software Matlab 2020a. Posterior al cálculo de los atributos del movimiento,
se le asignan las clases, donde cada movimiento se convierte en una etiqueta. Con
un grupo de diez movimientos bien ejecutados para Kinect y Vicon, y la
selección de los movimientos m1, m2 y m3 dentro de los mal ejecutados, estos se
seleccionaron en función de tener una representación global de los estilos de
movimiento, finalmente se toma el movimiento uno y se segmenta en diez
repeticiones para ser comparado respecto a si mismo.
, con n como el número de marcadores que posee
el sujeto. Con esto se conforma una matriz de atributos con un número de
columnas que depende de la cantidad de marcadores, el cual será multiplicado
por el número de componentes espaciales y vectores, en donde para el caso de
los datos Vicon se generan 429 columnas y para el Kinect 242. El número de
filas depende de la cantidad de cuadros por minuto que contenga el movimiento.
lo que se vería reflejado en el número de marcos móviles de referencia. Para
el cálculo de estos componentes se utilizó el software Matlab 2020a. Posterior al cálculo de los atributos del movimiento,
se le asignan las clases, donde cada movimiento se convierte en una etiqueta. Con
un grupo de diez movimientos bien ejecutados para Kinect y Vicon, y la
selección de los movimientos m1, m2 y m3 dentro de los mal ejecutados, estos se
seleccionaron en función de tener una representación global de los estilos de
movimiento, finalmente se toma el movimiento uno y se segmenta en diez
repeticiones para ser comparado respecto a si mismo.
Finalmente se plantea un esquema de clasificación donde se proponen los algoritmos, máquinas de soporte vectorial (SVM) , redes neuronales (RN) y vecinos más cercanos (KNN), para la clasificación se utilizó el software WEKA en su versión 3.8.5, con los siguientes parámetros individuales, para KNN se tomó el valor de k = 1, ya que al aumentar el número de vecinos el porcentaje de éxito en la clasificación disminuye, además se tomó como métrica de comparación la distancia Euclídea, para SVM se tomaron los parámetros por defecto proporcionados por el software, y para RN dos capas ocultas, construyendo de esta forma la estructura metodológica, como se muestra en la Fig. 3, para clasificar el grupo de dinámicas. Cabe anotar que el uso de estos algoritmos es en función de evaluar la capacidad de representación de los datos.
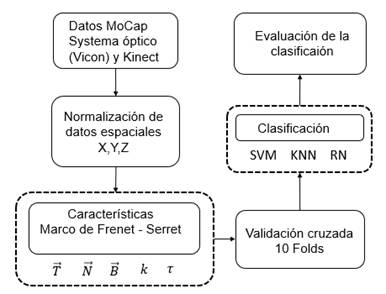
Fig. 3. Propuesta metodológica.
3. RESULTADOS
Basado en los resultados de clasificación de las dinámicas o movimientos, mostrados en la Tabla 1. Se determinó que al momento de realizar las comparaciones entre los diez movimientos se logra una clasificación del 100 % con cada uno de los algoritmos en los datos Vicon, los que no se logra con los datos del Kinect, como se muestra en las matrices de confusión, Fig. 4,5 y 6; sin embargo, si se toma los resultados de comparar los movimientos de forma individual se tiene movimientos que llegan al 99% de éxito en la clasificación, como el obtenido entre los movimientos de paso adelante (m3) y extensión de hombro (m8), disminuyendo en el porcentaje hasta el 67%, presentado entre los movimientos abducción de hombro (m7) y levantar brazo derecho (m10), observando que la mayoría de los movimientos presentaron porcentajes de alrededor del 90%.
Igualmente, se presenta en la Tabla 1, los resultados de la comparación entre los movimientos bien y mal ejecutados, encontrando porcentajes que varían entre el 70% y el 90% de clasificación para los movimientos, sentadilla profunda (m1), sobrepaso de obstáculo (m2), paso adelante(m3) para datos tomados con el Kinect, para los datos Vicon se tiene la tendencia de un 100% en la clasificación. Y por último se tiene los resultados un conjunto de ciclos de movimientos similares, con un 100% de éxito para Vicon y 92% para el Kinect.
Tabla 1. Resultados de la clasificación.

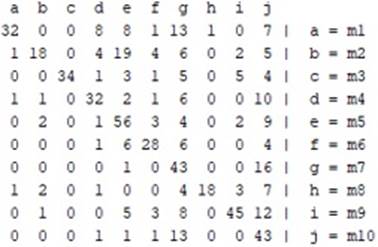
Fig. 4. Matriz de confusión KNN – Kinect.
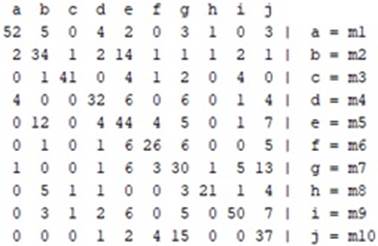
Fig. 5. Matriz de confusión SVM – Kinect.
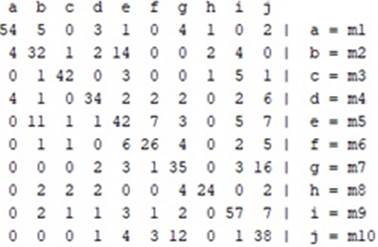
Fig. 6. Matriz de confusión RN – Kinect.
4. DISCUSIÓN
El primer elemento de referencia que se debe tener en cuenta es la capacidad descriptiva del marco de Frenet Serret, el cual logra una clasificación del 100% de los movimientos en datos tomados con la tecnología Vicon; esto, gracias a que cada punto donde se calcula el marco móvil es independiente, Caso contrario en los resultados obtenidos con el Kinect, que la clasificación es menor, esto posiblemente a que algunos marcadores quedan inactivos o con interferencia durante el movimiento, dado que el principio de funcionamiento del Kinect está basado en la detección de la posición de las articulaciones del cuerpo, por lo tanto que, al no detectarla o generarse una interferencia en la línea de visión del dispositivo se genera un valor nulo en la matriz de atributos.
Por otro lado, si se analiza los movimientos de paso adelante (m3) respecto a extensión de hombro (m8), se evidencia un porcentaje en la clasificación del 99% para el Kinect, con valores similares en el éxito de la clasificación para comparación de movimientos en donde se tiene un cambio apreciable en el movimiento dentro de un mismo plano del movimiento, posiblemente causado por la activación de marcadores que no presentan similitud en la trayectoria. Caso contrario, se puede observar en los porcentajes bajos de clasificación los cuales inician en un 67%, para movimientos como abducción de hombro (m7) respecto a levantar el brazo derecho (m10), los cuales coinciden en el mismo plano y extremidad en el movimiento, presentándose una mayor dificultad en separar los datos. Además, si se toma como referencia, los resultados expuestos, se puede inferir que los movimientos en donde se presentó mejor porcentaje de clasificación fueron en aquellos en donde la curvatura tiene un mayor peso, lo que se presenta en los movimientos con un cambio apreciable en la profundidad.
Finalmente, si se comparan resultados de trabajos con metodologías similares [13], se puede observar mejoras en el porcentaje de clasificación, con un 76% para movimientos simples, como el levantar una mano, a porcentajes del 100% de clasificación para datos Vicon y porcentajes del 90% en promedio para los movimientos evaluados con el Kinect, logrando diferencias considerables. Además, si se hace una comparación respecto a metodologías las cuales no incluyen el uso del marco de Frenet Serret, pero si el Kinect, se puede encontrar resultados en la clasificación que varían entre el 83% y 93% para la evaluación del movimiento de personas con trastorno de cadera [19], y del 95% en pacientes con Parkinson [2], con la diferencia que estos usan solo un marcador, lo que hace que aumente el porcentaje de clasificación.
5. CONCLUSIONES
En este trabajo se propuso el uso de características basado en las variables proporcionadas por el marco móvil de Frenet Serret, encontrando que en términos generales estas alcanzan a ser discriminantes de la dinámica de los movimientos evaluados; sin embargo, si se toma como referencia las respuestas de los componentes Tangencial, Normal y Binormal, la curvatura y torsión, los cuales indican los cambios del vector tangente a la curvatura para el primero y los cambios del vector binormal para el segundo, se puede inferir que los datos proporcionados por el Kinect presentan menor capacidad al momento de representar una dinámica, cuando el movimiento evaluado no presenta cambios de posición que hagan modificar el plano sobre el cual se posiciona el vector binormal.
No obstante, si se compara respecto a valores de clasificación observados en el estado del arte para este tipo de datos [1,3], los resultados obtenidos son prometedores logrando obtener una metodología robusta para movimientos complejos, más aun teniendo la ventaja del bajo costo, lo que permitiría usar ese tipo de herramientas como una ayuda en diferentes aplicaciones, ya sea médicas o deportivas, y no solo realizar análisis de movimiento en centros o laboratorios especializados que tengan acceso a sistemas de captura de movimiento que además se deben emplear en ambientes controlados.
6. AGRADECIMIENTOS
De antemano se hace un agradecimiento especial al Instituto Tecnológico Metropolitano de Medellín por el apoyo metodológico y logístico para la finalización exitosa de este trabajo de investigación.
7. REFERENCIAS BIBLIOGRÁFICAS
[1] Napoli, A., Glass, S., Ward, C., Tucker, C., & Obeid, I. (2017). Performance analysis of a generalized motion capture system using microsoft kinect 2.0. Biomedical Signal Processing and Control, 38, 265-280. https://doi.org/10.1016/j.bspc.2017.06.006
[2] Galna, B., Barry, G., Jackson, D., Mhiripiri, D., Olivier, P., & Rochester, L. (2014). Accuracy of the Microsoft Kinect sensor for measuring movement in people with Parkinson's disease. Gait & posture, 39(4), 1062-1068. https://doi.org/10.1016/j.gaitpost.2014.01.008
[3] Liao, Y., Vakanski, A., & Xian, M. (2020). A deep learning framework for assessing physical rehabilitation exercises. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 28(2), 468-477.
DOI: 10.1109/TNSRE.2020.2966249
[4] Raman, Natraj; Maybank, Stephen J.: Action classification using a discriminative multilevel HDP-HMM. En: Neurocomputing 154 (2015), p. 149-161. https://doi.org/10.1016/j.neucom.2014.12.009
[5] Devanne, Maxime; Wannous, Hazem; Berretti, Stefano; Pala, Pietro; Daoudi, Mohamed; Del Bim-bo, Alberto: 3-d human action recognition by shape analysis of motion trajectories on riemannian man-ifold. En: IEEE transactions on cybernetics 45 (2015), Nr. 7, p. 1340 - 1352. DOI: 10.1109/TCYB.2014.2350774
[6] Vemulapalli, Raviteja; Arrate, Felipe; Chellappa, Rama: Human action recognition by representing 3d skeletons as points in a lie group. En: Proceedings of the IEEE conference on computer vision and pattern recognition, 2014, p. 588-595.
[7] Muller, Meinard; Roder, Tido; Clausen, Michael: Ecient content-based retrieval of motion capture data. En: ACM Transactions on Graphics (ToG) Vol. 24 ACM, 2005, p. 677- 685.
[8] Lei, Q., Du, J. X., Zhang, H. B., Ye, S., & Chen, D. S. (2019). A Survey of Vision-Based Human Action Evaluation Methods. Sensors, 19(19), 4129. https://doi.org/10.3390/s19194129
[9] Chaudhry, Rizwan; Ofli, Ferda; Kurillo, Gregorij; Bajcsy, Ruzena; Vidal, Rene: Bio-inspired dynamic 3d discriminative skeletal features for human action recognition. En: Computer Vision and Pattern Recognition Workshops (CVPRW), 2013, IEEE Conference on IEEE, 2013, p. 471-478.
[10] Presti, Liliana L.; La Cascia, Marco: 3D skeleton-based human action classification: A survey. En: Pattern Recognition 53 (2016), p. 130 – 147.
[11] Slama, Rim; Wannous, Hazem; Daoudi, Mohamed; Srivastava, Anuj: Accurate 3D action recognition using learning on the Grassmann manifold. En: Pattern Recognition 48 (2015), Nr. 2, p. 556 – 567.
[12] Shao, Zhanpeng; Li, Youfu: Integral invariants for space motion trajectory matching and recognition. En: Pattern Recognition 48 (2015), Nr. 8, p. 2418-2432.
[13] Wang, W. C., Chung, P. C., Cheng, H. W., & Huang, C. R. (2015, May). Trajectory kinematics descriptor for trajectory clustering in surveillance videos. In Circuits and Systems (ISCAS), 2015 IEEE International Symposium on (pp. 1198-1201). IEEE.
[14] Shao, Z., Li, Y., Guo, Y., & Zhou, X. (2018). Describing Local Reference Frames for 3-D Motion Trajectory Recognition. IEEE Access, 6, 36115-36121. DOI: 10.1109/ACCESS.2018.2849690
[15] Wu, S., & Li, Y. F. (2010). Motion trajectory reproduction from generalized signature description. Pattern Recognition, 43(1), 204-221.
[16] Wu, S., & Li, Y. F. (2009). Flexible signature descriptions for adaptive motion trajectory representation, perception, and recognition. Pattern Recognition, 42(1), 194-214.
[17] Arn, R. T., Narayana, P., Emerson, T., Draper, B. A., Kirby, M., & Peterson, C. (2018). Motion segmentation via generalized curvatures. IEEE transactions on pattern analysis and machine intelligence, 41(12), 2919-2932. DOI: 10.1109/TPAMI.2018.2869741
[18] Vakanski, A., Jun, H. P., Paul, D., & Baker, R. (2018). A data set of human body movements for physical rehabilitation. https://doi.org/10.3390/data3010002
[19] Asaeda, M., Kuwahara, W., Fujita, N., Yamasaki, T., & Adachi, N. (2018). Validity of motion analysis using the Kinect system to evaluate single leg stance in patients with hip disorders. Gait & posture, 62, 458-462. https://doi.org/10.1016/j.gaitpost.2018.04.010