MANTENIMIENTO Y
REPARACIÓN DE VÍAS USANDO UN SISTEMA ROBÓTICO EN LA NUBE
Andrés Felipe Madrigal Mejia1, Sebastián Torres2,
Jaime Alberto. Guzmán-Luna3, Ingrid-Durley Torres4
1Ingeniero de
Sistemas, Escuela
de Ingeniería de Antioquia, Calle 59A N63 -20, Medellín, Colombia, afmadrigalm@unal.edu.co
2Ingeniero de
Sistemas, Universidad Nacional de Colombia, Calle 59A N63 -20, Grupo de
Investigación SINTELWEB, Medellín, Colombia, storresy@unal.edu.co
3Doctor en Ingeniería de
Sistemas, Magister en Sistemas e Ingeniero Civil, director del Departamento de
Ciencias de la Computación y la Decisión, Docente Investigador, Líder grupo de
investigación SINTELWEB, Medellín, Colombia, jaguzman@unal.edu.co, https://orcid.org/0000-0003-4737-1119
4Doctora en Ingeniería
de Sistemas, Magíster en Sistemas e Ingeniera de Sistemas. Editora de la
Revista Lámpsakos. Docente Investigadora, Universidad Católica Luis Amigó,
Medellín, Colombia. Ingrid.torrespa@amigo.edu.co
https://orcid.org/0000-0003-4503-7512
RESUMEN
La revolución del internet de las cosas -
IoT, genera nuevos retos para el campo de la robótica; Para la construcción de
las aplicaciones y comunicación de los sistemas robóticos, con la nube, fueron
creados protocolos y conceptos, que facilitan y estandarizan la interconexión,
algunos de estos conceptos son: servicios web, programación XML, sistema
WS-BPEL, Arquitectura Orientada Servicio, Big data y computación en la nube.
Este artículo, muestra una aplicación específica de la integración del concepto
de IoT con la robótica, representado por un sistema de reparación y
mantenimiento de vías autónomo, con un sistema robótico en la nube, el cual
utiliza servicios web y protocolos de comunicación como XML y BPEL para la
interconexión entre la información necesaria para la reparación y mantenimiento
de las vías, usados en la toma de decisiones y tareas asignadas entre los
robots. De esta manera, se demuestra, cómo es posible articular todos los
conceptos, para lograr soluciones en un escenario real de reparación de vías.
Palabras clave: Arquitectura Orientada al Servicio (SOA), WS-BPEL,
XML, Composición de Servicios Web, Servicios Web, Computación en la Nube.
Recibido: 3 de Agosto de 2020. Aceptado: 7 de Diciembre
de 2020
ROAD MAINTENANCE AND REPAIR USING ROBOTIC
CLOUD SYSTEM
ABSTRACT
Abstract, the revolution in the Internet of Things
(IoT), creates new challenges for the field of robotics. For the construction
of applications and communication of robotic systems with the cloud, certain
protocols and concepts were created which facilitate and standardize this
interconnection process. This article shows a specific application of the
integration of the IoT concept with robotics, represented as an autonomous path
repair and maintenance system with a robotic system in the cloud, which uses
web services and communication protocols such as XML and BPEL to The
interconnection between the information necessary for the repair and
maintenance of the roads, decision making and tasks assigned between robots. In
this way, it is demonstrated how it is possible to articulate all the concepts
to achieve solutions in a real road repair scenario.
Keywords: Service
Oriented Architecture (SOA), WS-BPEL, XML, Web Services Composition, Web
Services, Cloud Computing.
Cómo citar este artículo: A. Madrigal, S. Torres, J. Guzmán, I. Torres. “Mantenimiento y reparación de vías usando
un sistema robótico en la nube”, Revista Politécnica, vol.16, no.32 pp.87-95,
2020. DOI:10.33571/rpolitec.v16n32a8
1. INTRODUCCIÓN
La
integración he interconexión entre dispositivos, es un reto que se tiene entre
los diferentes avances tecnológicos, la comunicación y el entendimiento entre
lenguajes, esto constituye un problema a superar [15]. Para darle solución a
este reto, diferentes áreas del conocimiento investigan en la estandarización
de protocolos de comunicación, que faciliten la interconexión entre máquinas.
Dependiendo
de las necesidades y el tipo mecanismo o vía de interconexión, se crearon
durante la historia arquitecturas de comunicación que facilitaban la
realización de actividades o tareas básicas entre dispositivos [1].
Con
la revolución de los dispositivos móviles y el creciente desarrollo de las
telecomunicaciones, se instalaron ciertas tendencias las cuales están
revolucionando el modo de ver el mundo y como es de esperarse el internet es
una de ellas; el internet de las cosas (IoT) [7], representa una de las
tendencias más importantes de nuestro tiempo impulsa el desarrollo y abre
nuevas puertas a la investigación en áreas del conocimiento como la
estadística, electrónica, control, sistemas, programación y robótica [4].
Los
sistemas robóticos no han quedado exentos a dichas tendencias y alrededor de
estos temas se genera un nuevo campo de investigación, llamado, robótica en la
nube [5], el cual se basa en crear la interconexión entre sistemas robóticos
por medio de servicios web [12], para facilitar las tareas y trabajos entre los
mismos; haciendo uso de la computación en la nube, Big data, tecnologías XML
[16], aprendizaje colaborativo y conocimiento experto [9].
Para
este artículo se implementó un sistema de mantenimiento y reparación de vías
por medio de un sistema robótico en la nube el cual, hace uso de servicios web
como, optimización de rutas, consulta del clima, comunicación entre robots,
vías por reparar, tareas específicas de pavimentación y movimientos de los
robots.
El
Artículo se encuentra distribuido de la siguiente manera: La sección 2,
describe detalladamente el problema. La sección 3 explica, las características
generales del sistema propuesto. La sección 4, detalla cada una de las
tecnologías utilizadas y explica en detalle el diseño del sistema. La sección
5, muestra el sistema físico elaborado, y finalmente la sección ,6 presenta las
conclusiones y trabajo futuro.
2. DEFINICIÓN DEL PROBLEMA
El problema en estudio consiste en el
mantenimiento y reparación de huecos de vías principales y secundarias de una
cuidad [14]; por simplicidad para la simulación del problema se caracterizan
los huecos, tipo de vía, horario de reparación de los daños, pronóstico del
clima y recolección de la información, tal como se explica a continuación:
2.1 Tipos de daños
Dentro del problema se manejan tres tipos
de daños los cuales están caracterizados por colores, dónde el amarillo,
representa un hueco superficial; el azul, representa un hueco mediano y el
rojo, representa un hueco profundo. Para cada uno de estos daños, el
procedimiento a seguir para su reparación difiere, como se muestra a
continuación:
2.1.1. Amarillo (Daño superficial)
Este es el daño más sencillo y rápido de reparar,
debido a que el robot encargado de realizar el mantenimiento y reparación de
los daños solo debe aplicar asfalto al hueco para su reparación.
2.1.2. Azul (Daño Mediano):
Este tipo de daño es un poco más complejo y toma más
tiempo para la reparación ya que el robot debe aplicar dos tipos de materiales
para reparar el hueco, primero se aplica una capa de gravilla y segundo se debe
aplicar una capa de asfalto para la completa reparación del hueco.
2.1.3.
Rojo
(Daño Profundo):
Este es el daño más complejo y el que toma más tiempo
en reparar, el procedimiento que el robot debe de seguir para la reparación de
este daño toma tres pasos, el primero es la aplicación de tierra para la
nivelación del hueco con la vía, el segundo en la aplicación de gravilla y el
tercero es la aplicación de asfalto para terminar con la reparación del daño.
Para toda reparación de daños en las vías (Amarillo,
Azul y Rojo) el robot debe armar un perímetro seguro, con señalizaciones de
alerta, para indicar a los vehículos que se está realizando un trabajo en la
vía y que deben tener precaución.
2.2. Tipo de Vía
Para la priorización de la reparación de los daños en
las vías, el problema maneja dos tipos calles: principales, como autopistas y
calles secundarias. Debido a que un hueco en una autopista es más peligroso
dado las velocidades que se manejan en dicha vía, el robot debe priorizar por
la reparación de estos daños, dejar en espera los daños de vías secundarias.
2.3. Pronóstico del clima
Esta variable es importante a consultar ya que
dependiendo del estado del clima que se tenga es posible o no la reparación de
los daños en las vías, o el tiempo de reparación puede ser mayor por un clima
no apto para el trabajo.
2.4. Recolección de la información
El sistema identifica los daños por reparar por medio
de un robot que realiza recorridos por las vías y analiza el estado de estas, reportando
dichos estados a un servicio web donde se almacena la información recolectada.
El estado inicial del problema se muestra en la Figura. 1. Hay dos robots en el
punto S0, donde el robot R1 es el encargado de realizar los
recorridos por las vías, el análisis las mismas y determinar el tipo de hueco y
el robot R2 es el encargado de la priorización de la reparación de los daños en
las vías según la información recolectada por el robot R1 o de la información
en la nube y todas las variables mencionadas con antelación y de realizar la
reparación de los huecos. (Ver Figura. 1 y Figura. 2).
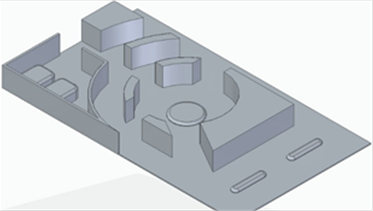
Figura. 1: Mapa de vías
Fuente: Elaboración propia
3. PROPUESTA DE DISEÑO
El
objetivo del problema consiste en la reparación de daños en las vías
principales y secundarias de una ciudad, para la realización de dicha labor se
tienen en cuenta las siguientes consideraciones:
·
Dentro
del estado inicial del problema se tiene definido la zona de suministros
necesarios para la reparación de las vías y el punto inicial de los robots R1 y
R2, Esta zona se puede visualizar en la Figura. 2 y su numeración es S0.
·
Para
la reparación de las vías se tiene una priorización de los tipos de daños como
se explica en la definición del problema en tipos de huecos.
·
Cuando
se realiza la planificación de la reparación de un hueco, el robot debe tener
en cuenta el pronóstico del clima, para poder determinar la forma más adecuada
de la reparación del daño. La consulta de esta información será un servicio
web.
·
La
caracterización de las vías y la identificación de los daños, será suministrado
por uno de los robot el cual está encargado de recorrer las vías e identificar
donde se encuentran los huecos y alimentar un base de datos en la nube para la
consulta del otro robot.
Se debe
tener presente que el proceso debe generar un plan óptima tnto para la
reparación de los huecos como para la ruta del robot, este proceso se debe
realizar como un servicio web, debido al consumo computacional que requiere el
cálculo de este proceso.
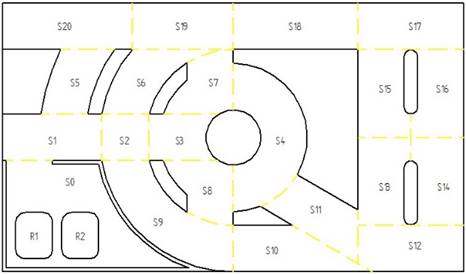
Figura. 2.
Estado inicial y numeración de vías
Fuente: Elaboración propia
4. DISEÑO DETALLADO
Las
técnicas implementadas en este trabajo para los protocolos de comunicación vía
Ethernet, se enfocan en metodologías de servicios web y en arquitecturas
orientadas a servicios, como XML(eXtensible Markup Language) [16], SOA (Service
Oriented Architectures) [4], BPEL (OASIS, 2018) y adicionalmente para la
priorización de las rutas y el trabajo del robot se utiliza el planificador
JSHOP [17], estos elementos se explican a continuación:
4.1. Tecnología XML
XML es un lenguaje definido por marcas, que
permite desarrollar estándares para el intercambio de información estructurada
entre diferentes plataformas.
Los datos que generan e intercambian los
diferentes servicios web tienen una estructura definida por un lenguaje XML
4.2. Tecnología SOA
Describe un paradigma de arquitectura que
permite desarrollar sistemas software distribuido. Este tipo de arquitecturas
se basan en el concepto de servicio, definido en el libro Service-Oriented Architecture. Concepts, Technology and Design, escrito por Thomas
Erls [6].
4.3. Tecnología BPEL
Es un lenguaje de orquestación
estandarizado por OASIS (Organization for the Advancement of Structured
Information Standards) para el desarrollo de servicios web. El BPEL
consiste en un lenguaje diseñado para controlar de forma centralizada el
llamado de los diferentes servicios web, con lógica de negocios, lo cual
permite la programación a gran escala (Programming in the Large) [11].
4.4. Planificador JSHOP2
JSHOP2 es un sistema de planificación
independiente del dominio basado en la descomposición de tareas ordenadas, una
versión modificada de la planificación HTN que implica planificar tareas en el
mismo orden en que se ejecutarán en el futuro. JSHOP2 tiene las siguientes
características:
·
Conoce
el estado actual del mundo en cada paso de la planificación proceso.
·
Incorpora
muchas características de PDDL [8].
·
Permite
la combinación de tareas parcialmente ordenadas mediante el uso de la palabra
clave.
El desarrollo de los servicios web
implementados en la práctica se divide entre el robot de caracterización de los
huecos y el robot encargado de reparar las vías [2], estos se explican a
continuación:
4.5. Robot caracterización de huecos
R1
Para el funcionamiento de este robot se
tiene un archivo BPEL que coordina el servicio web que realiza el movimiento
del robot y el servicio web en el que se almacena el estado de las vías.
4.6. Robot encargado de reparar huecos R2
Este robot utiliza todos los servicios
disponibles para realizar la tarea de pavimentación de los huecos, el primer
servicio que utiliza es el planificar de tareas JSHOP para determinar las
labores del robot, luego, el BPEL toma los resultados entregados por el planificador
y se encarga de ejecutar dichas tareas, por último, el BPEL se encarga de
consultar los servicios web para realizar todas las tareas para la reparación
de los huecos.
4.7. Descripción de los servicios
implementados para la reparación de vías
Para la reparación de las vías se tiene dos
robots, el primero se encarga de las caracterizaciones los huecos como se
explica en el aparte 4.1 y el segundo es el encargado de la reparación de los
huecos, como se explica en el aparte 4.2, el proceso inicia con el robot R1
realizando un recorrido de vías predeterminado para determinar los segmentos
que tiene daños en el asfalto, para el censado, el movimiento y todas las
acciones que debe realizar el robot se utiliza un servicio web, adicionalmente,
para el reporte de los huecos se utiliza otro servicio web. Luego del reporte
de los huecos por el robot R1, el robot R2 utilizando el BPEL para consultar
los reportes del clima en cada segmento (S1, S2, S3, etc.) del mapa y el
reporte de los huecos, con dicha información el planificador JSHOP monta la
ruta que debe realizar el robot R2, y el BPEL con la información del JSHOP
determina las acciones que debe realizar el robot por servicios web (Compactar,
aplicación de tierra, aplicación de gravilla, aplicación de asfalto, etc.).
Para el proceso de la creación de la ruta
se llama un servicio web el cual se encarga de buscar la ruta óptima. En esta
implementación se deben tener presente ciertas consideraciones:
·
El
servicio web de optimización de las rutas, guarda las trayectorias calculadas,
para no tener que calcular de nuevo la ruta, en caso de que el algún robot
tenga que realizar dicho recorrido de nuevo, de esta forma se establece un
aprendizaje colectivo entre los robots.
·
Esta
aplicación está desarrollada, para que los huecos sean dinámicos, es decir,
dependiendo de cómo cambie el mundo con respecto a los daños de las vías y al
clima de los sectores los planes generados y las acciones ejecutadas por los
robots cambian.
En el siguiente diagrama se bosqueja la integración
de los diferentes sistemas en la implementación del Sistema Robótico en la Nube
para Mantenimiento y Reparación de vías. (Figura. 3).
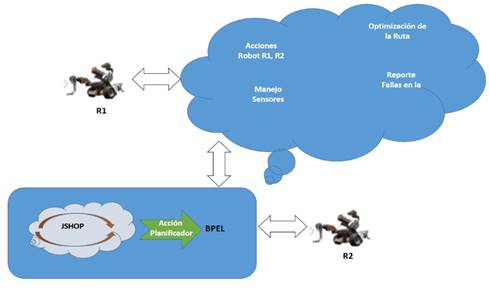
Figura. 3. Funcionamiento del sistema
Robótico en la nube
Fuente: Elaboración propia
4.8. Arquitectura
del sistema
La
arquitectura del sistema se basa en tres puntos esenciales uno es la
computación en la nube, permitiendo la realización de tareas complejas con
sistemas
tanto en hardware como en software livianos, planificación jerárquica de
tareas, la cual permite la planificación de la reparación y mantenimiento de
las vías de forma autónoma y por último la orquestación de servicios web por
medio del BPEL, donde trabaja como procesador central coordinando todas las
tareas del sistema. Este esquema se puede visualizar en la siguiente Figuraura
(ver Figura. 4).
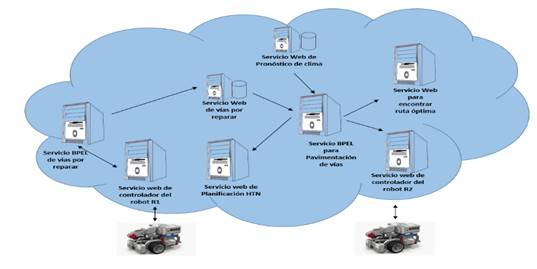
Figura. 4. Esquema
de Arquitectura del Sistema
Fuente: Elaboración
propia
4.9. Servicios
Web
Los servicios web implementados para la
solución de este problema se pueden ver en la Figura. 4, estos servicios han
sido descritos previamente en la sección 4.7, a continuación se listan los
servicios web utilizados:
·
Vías
Por Reparar
·
Pronostico
del Clima
·
Ruta
Optima
·
Controladores
del Robot:
o Moverse a un
Lugar Contiguo
o Manejo de
los sensores
o Tomar
material de Pavimentación
o Compactar.
4.9. Orquesatación de servicios Web con BPEL
La orquestación de todo el sistema
(Gerasimov, 2019), para los diferentes servicio web esta construido en un
modelo de administración llamado BPEL. La lógica implementada para la creación del algoritmo
de BPEL el cual se encarga de manejar y controlar todos los comandos del
sistema y las tareas a realizar, se muestra en la Figura. 5, donde se analiza
las acciones de ejecución para la pavimentación y con respecto a dichas
acciones se determina la siguiente tarea a realizar.
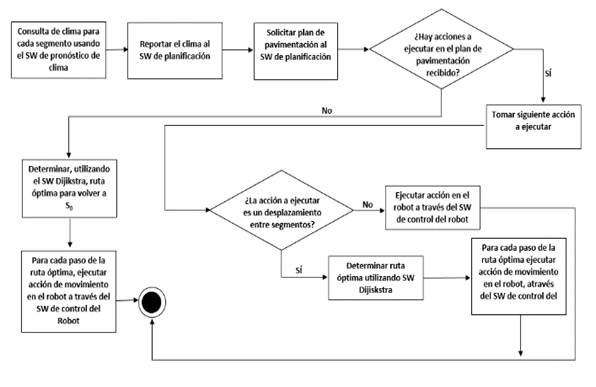
Figura. 5. Algoritmo para el Sistema BPEL
Fuente:
Elaboración propia
5. SISTEMA FÍSICO
Para la aplicación práctica se imprimió el esquema de vías
señalado previamente en Figura. 2, en un tamaño de 1450x2500 mm, con un ancho
de vías de 250 mm, para facilitar el movimiento de los robots utilizados ver
Figura. 6. Para la caracterizacion y mantenimiento de las vias se
construyeron dos robots marca Lego [10], los cuales fueron ensamblados a la
necesidad especifica que se tenia, tanto en accesorios fisicos como en
sensórica y unas pinzas. Para darle solucion al problema, los robots manejan
sensores de color para identificar la severidad de los daños en las vias como
se explicó en la sección 2.1.


Figura. 6.
Implementación del Esquema de Vías Físico
Fuente: Elaboración propia
6. CONCLUSIONES
El sistema desarrollado IoT,
implementado bajo una arquitectura de computo en la nube, permite demostrar la
viabilidad funcional de la propuesta. Aunque, constituye solo un prototipo, la
descripción de la articulación de cada módulo expuesto en la fase de diseño de
la propuesta, permite trasladar todos sus elementos, al mundo real, tal como
han sido definidos. Considerando sí, el cambio de los robots a unos equipos de
hardaware, que se ajusten al escenario de las vias. Los servicios web actúan en
función de operaciones petición y respuesta, permitiendo, la recolección de
información (no solo de la via, sino del pronóstico del clima) y otorgar la
respuesta de actuación del robot en el medio real; la planificación constuye el
plan para cada reparación de la via y las tecnologías implementadas constiuyen
el medio de comunicación y consecución de cada objetivo. El articulo demuestra
además como implmentar técnicas de inteligencia artificial y tecnologias web,
para implmentar sistemas IoT.
7. REFERENCIAS
[1]
Armagno,
G., Benavides, F., & Rostagnol, C. (2007). Descripción de la arquitectura
del sistema. Instituto de la Computación, Facultad de Ingeniería Universidad de
la República. Montevideo, Uruguay.
[2]
Bonnin-Pascual
F., Ortiz A. (2019). On the use of robots and vision technologies
for the inspection of vessels: A survey on recent advances. Ocean
Engineering, Volume 190, 15 October 2019, 106420. Doi:
10.1016/j.oceaneng.2019.106420
[3]
Dey
N., Hassanien A., Bhatt C., Ashour A., Chandra S. (2018). Internet of Things
and Big Data Analytics Toward Next-Generation Intelligence. Springer, 2018.
https://doi.org/10.1007/978-3-319-60435-0
[4]
Fakhar
S., Khaim R., Humayun M., Jhanjhi N.K., Alamri† M. (2019). SOA Issues and their
Solutions through Knowledge Based Techniques – A Review. IJCSNS
International Journal of Computer Science and Network Security, VOL.19
No.1, January 2019
[5]
Firouzi
F., Farahani B. (2020) Architecting IoT Cloud. In: Firouzi F., Chakrabarty K.,
Nassif S. (eds) Intelligent Internet of Things. Springer, Cham. 22
January 2020. Doi: 10.1007/978-3-030-30367-9_4
[6]
Gerasimov
N. (2019). New approach to typified microservice composition and discovery. Journal of
Automation Mobile Robotics and Intelligent Systems 2019 | Vol. 13,
No. 1 | 79—83. Doi: 10.14313/JAMRIS_1-2019/10
[7]
Gubbia
J., Buyyab R., Marusica S., Palaniswamia M. (2012). Internet of Things
(IoT): A vision, architectural elements, and future directions. Future
Generation Computer Systems. Volume 29, Issue 7, September 2013, Elsevier.
Pages 1645-1660. Doi: 10.1016/j.future.2013.01.010
[8]
Helmert
M. (2008). Concise finite-domain representations for PDDL planning tasks.
Artificial Intelligence 173 (2008) 503–535. Elsevier.
doi:10.1016/j.artint.2008.10.013
[9]
Jiménez,
S., Fernández, F. & Borrajo, D. (2012). Integrating Planning, Execution,
and Learning to Improve Plan Execution. Computational
Intelligence, 29(1), 1-36. Doi: 10.1111/j.1467-8640.2012.00447.x
[10]
LEGO,
Group (2015). 31313 MINDSTORMS EV3 - Products - Mindstorms LEGO.com. Lego.com.
Recuperado de: https://www.lego.com/es-ar/themes/mindstorms
[11]
Muller
H., Klashinsky K. (1998). Rigi-A system for programming-in-the-large. ICSE '88:
Proceedings of the 10th international conference on Software engineering. April
1988. Doi: 10.5555/55823.55832
[12]
Niknejad
N., Hussin A.R.C., Amiri I.S. (2019) Literature Review of Service-Oriented
Architecture (SOA) Adoption Researches and the Related Significant Factors. In:
The Impact of Service Oriented Architecture Adoption on Organizations. SpringerBriefs
in Electrical and Computer Engineering. Springer, Cham
[13]
OASIS.(2018).
IBM (2018). Web Services Business Process Execution Language (WSBPEL) TC.
Extraído de https://www.oasis-open.org/committees/tc_home.php?wg_abbrev=wsbpel.
consulta: 10/04/20.
[14]
Quinn,
B E. (1983). Problems encountered in using vehicle ride as a criterion of
pavement roughness. Transportation Research Record, Issue Number: 946.
Publisher: Transportation Research Board. URL:
http://onlinepubs.trb.org/Onlinepubs/trr/1983/946/946-001.pdf
[15]
Sarkar
M., Pradhan P. & Ghose D. (2019). Planning Robot Motion using Deep Visual
Prediction. 7th ICAPS Workshop on Planning and Robotics (PlanRob), 2019. 24
de june of 2019. Recuperado de: https://arxiv.org/abs/1906.10182
[16]
Vega
Romero, J. (2006). Definición de estrategias de robots jugadores de fútbol a
través de XML. (Tesis de maestría). Instituto tecnológico y de estudios
superiores de Monterrey, Monterrey. México.
Yang L., Fei J. L., Hackney P., Flanagan M.,
(2008). Job shop planning and scheduling for manufacturers with manual
operations. Expert System. 30 de august, 2018. Doi: 10.1111/exsy.123