1.
INTRODUCCIÓN
Debido
a que los avances tecnológicos para la elaboración de software para robots
cambian continuamente, se hace necesario rediseñar las estrategias e incluso
adquirir nuevas habilidades o conocimientos que permitan asumir los nuevos
retos. Por ejemplo, se evidenciaba el uso intensivo de compuertas digitales,
las cuales se encontraban incorporadas en circuitos integrados. Esta tecnología
hacía uso de la lógica digital para la implementación los algoritmos que
permite interpretar los datos de los sensores y dirigir los diferentes
actuadores en las plataformas robóticas. Estos desarrollos, aunque cumplen su
objetivo de manera eficiente, ocupan un espacio físico considerable [1]. Es por
ello que se empieza a experimentar el sistema de control de los prototipos con
procesadores, con la particularidad de que el desarrollador debe incorporar el
código en una memoria externa. El ingreso de instrucciones a estos dispositivos
es complejo, debido a que está basado en códigos hexadecimales, que representan
una instrucción dentro de la tabla de comandos y, además, para una correcta
implementación es necesario conocimientos en electrónica [1].
En
aras de reducir el tamaño de los sistemas de control llega la era de los
microcontroladores, los cuales son dispositivos integrados que poseen
internamente la arquitectura de un mini computador y, por consiguiente, todos
los elementos que antes se encontraban separados (como en el caso de los
procesadores) ahora están incorporados en un chip, por lo que se convierten una
alternativa viable para el desarrollo de tarjetas electrónicas.
En
la actualidad, existe un creciente interés por los computadores monoplaca que
-a diferencia de sus antecesores- permiten la instalación de un sistema
operativo. Esta característica los hace más versátil para la programación y,
por ende, más idóneos para proyectos de investigación orientados a la robótica.
Cabe
resaltar que la posibilidad de usar sistemas operativos embebidos en los robots
demanda la creación de diferentes librerías y frameworks para facilitar
la implementación de algoritmos más elaborados en las plataformas robóticas
[2]. Cada uno de estos cambios proponen retos en el desarrollo de software y,
por tanto, diferentes formas de hacer las cosas. Es de esperarse que se generen
cambios en las metodologías que se ajusten a los avances científicos,
tecnológicos y técnicos de la robótica.
Existen
diferentes frameworks que suministran librerías para el desarrollo de
software orientados a las plataformas robóticas. Entre ellos el Sistemas
Operativo para Robots (ROS por sus siglas en inglés), el cual maneja librerías
de lógica difusa, inteligencia artificial, visión por computador entre otros.
Es decir, aparece la oportunidad y conveniencia de diferentes paradigmas que
facilitan la construcción de diseños sofisticados para implementar soluciones a
problemas de movilidad, visión y toma de decisiones entre otros [3].
Así
mismo, la disposición a investigar sobre el middleware ROS, prevé que los
usuarios requieran una metodología de trabajo enfocada a la validación y
experimentación de los algoritmos diseñados. Algunos de estos usuarios poseen
poco o ningún conocimiento de ingeniería de software, programación orientada a
objetos y aplicaciones distribuidas. Por lo tanto, se debe definir una
metodología de trabajo práctico, sencillo y fácil de aprender.
El
aporte de este artículo es el diseño de una metodología basada en el proceso
ágil XP, que además incorpora en el diseño diagramas propios del UML para el
desarrollo de software utilizando ROS en plataformas robóticas con fines
educativos o de investigación. Lo anterior permite realizar aplicaciones de
manera metódicas en sistemas embebidos.
El
artículo se divide en los siguientes capítulos: en el primero, se presenta la
introducción luego, se exteriorizan los materiales y métodos empleados. En el
capítulo tres se muestra la metodología para luego exhibir, en el capítulo
cuatro los resultados y la discusión. Finalmente se enseñan las conclusiones y
la bibliografía.
2. MATERIALES
Y METODO
2.1 Robot Operating System (ROS)
ROS es un framework para robots que permite
configurar una amplia gama de plataformas robóticas, que poseen una colección
de herramientas, librerías, y convenciones con el objetivo de simplificar la
programación. Por estas características es unos de los más usados a nivel
mundial [4]. Incorpora tópicos en diferentes campos como la visión artificial,
mapeo de ambientes internos, reconocimiento de objetos, entre otros. ROS está
diseñado para ejecutarse como un middleware multiprocesos. El hecho de
ejecutar la programación de manera paralela, hace que mejore su desempeño, y
evita pausas innecesarias. Por ejemplo, un nodo puede obtener información de un
sistema de percepción visual a medida que un robot se va desplazando. Lo
anterior, impide que se interrumpa la trayectoria mientras se obtienen imágenes
de su entorno.
El middleware ROS puede funcionar con diferentes
lenguajes de programación e implementa varios recursos para permitir que los
usuarios desarrollen sus propios nodos. Por ejemplo, tenemos: Rosjava sirve
para aplicaciones en Java, Roscpp que son librerías que permiten programar en
C++. y, también Rospy que usa todas las ventajas del lenguaje Python.
El funcionamiento de ROS se puede visualizar en el
siguiente ejemplo: en la figura 1 se aprecian dos nodos, uno para sensor y otro
para el motor. Inicialmente, el nodo sensor notifica al master (servidor de
registros y nombres para otros nodos) que quiere publicar imágenes sobre el topic
“Distancia”:
Fig. 1. Publicador
informa al Master
Después, el nodo sensor publica los datos en el topic
distancia, y queda a la espera de los procesos que se quieran inscribir. Luego,
control motor solicita suscribirse al topic distancia con el fin de
recuperar los datos capturados por el sensor figura 2.
Fig. 2. Suscriptor
informa al Master y publicador conecta al topic.
Ahora que el tema distancia tiene tanto un publicador como
un suscriptor, el nodo maestro notifica al nodo del sensor y control motor
sobre la existencia de cada uno de ellos para que puedan comenzar a transferir
datos entre sí, como lo ilustra la Fig. 3:

Fig. 3. Publicador y
suscriptor conectados por medio de un topic.
Con el anterior ejemplo se puede visualizar el
comportamiento de los topic, el master y los nodos implementados en una
plataforma robótica.
2.2 Programación extrema
La programación extrema (XP por las siglas en inglés) es un
proceso ágil de desarrollo de software, enfocada a las buenas prácticas de
codificación, una clara comunicación y al trabajo en equipo. Está concebida
para proyectos medianos y pequeños donde los requisitos son cambiantes. Por lo
tanto, tiene una serie de reglas y recomendaciones que se pueden dividir en
planeación y gestión, diseño, codificación, y pruebas para producir un
software.
En la planeación y gestión se utilizan historias de
usuario, en vez de los casos de uso, para definir el cronograma de entrega de
los productos funcionales del software [6].
El diseño debe ser simple para lo cual se usan tarjetas
Clase-Responsabilidad-Colaborador (CRC). También se implementan metáforas que
permitan explicar la estructura del sistema a los nuevos integrantes del
equipo.
La codificación se realiza en parejas, es estandarizada por
el equipo de trabajo. Además, se realizan liberaciones frecuentes de versiones.
Por último, están las pruebas funcionales, donde se evalúa si la historia de
usuario fue implementada correctamente (Acceptance tests). También, se
realizan las pruebas unitarias que deben ser verificadas para todo el código
del proyecto.
2.3 Comparación de metodologías Programación
extrema
La Tabla I (obtenida de [8]) hace un cuadro comparativo de
diferentes metodologías agiles, como SCRUM, Crystal Methodologies, Dynamic
Systems Development Method (DSDM), Feature-Driven Development (FDD) y Lean
Development (LD). Por lo tanto, se evalúan parámetros como resultados,
adaptabilidad, colaboración, entre otros. Los valores más altos los obtienen XP
y Agile Software ´ Development (ASD). Pero XP sobresale de ASD en la excelencia
técnica, lo cual es un factor importante para este proyecto y, por lo tanto, un
factor diferenciador de XP entre los otros procesos ágiles.
Tabla 1. Comparación de
metodologías
|
|
CMM
|
ASD
|
Crystal
|
DSM
|
FDD
|
LD
|
SCRUM
|
XP
|
|
Sistema
como algo cambiante
|
1
|
5
|
4
|
3
|
3
|
4
|
5
|
5
|
|
Colabora-ción
|
2
|
5
|
5
|
4
|
4
|
4
|
5
|
5
|
|
Características metodología (CM)
|
|
Resultados
|
2
|
5
|
5
|
4
|
4
|
4
|
5
|
5
|
|
Simplicidad
|
1
|
4
|
4
|
3
|
5
|
3
|
5
|
5
|
|
Adaptabili-dad
|
2
|
5
|
5
|
3
|
3
|
4
|
4
|
3
|
|
Excelencia Técnica
|
4
|
3
|
3
|
4
|
4
|
4
|
3
|
4
|
|
Prácticas de colabora-ción
|
2
|
5
|
5
|
4
|
3
|
3
|
4
|
5
|
|
Media CM
|
2.2
|
4.4
|
4.4
|
3.6
|
3.8
|
3.6
|
4.2
|
4.4
|
|
Media Total
|
1.7
|
4.8
|
4.5
|
3.6
|
3.6
|
3.9
|
4.7
|
4.8
|
2.4 Plataforma robótica educativa Carlitos
Una plataforma robótica educativa es un conjunto de
elementos que hacen parte de un sistema autónomo que tiene ciertas habilidades como,
por ejemplo, mover objetos, realizar desplazamientos, vigilancia, entre otros.
Estas plataformas son aprovechadas en la parte académica para enseñar ciertos
principios propios de la robótica o de currículos, especialmente de ingeniería.
Para validar la metodología propuesta se utilizó el robot Carlitos (Ver Fig. 4).

Fig. 4. Componentes de
la plataforma robótica educativa Carlitos
La Fig. 4 muestra los componentes del robot Carlitos, a
saber: 1) Computador monoplaca. 2) Cámara de video. 3) Sensores ultrasónicos.
4) Bases de la estructura. 5) Cable USB de comunicaciones. 6) Conectores de
energía y datos. 7) Soporte cilíndrico para las bases. 8) Arduino Uno. 9)
Ruedas de desplazamiento. 10) Motores de corriente continua. 11) Batería de
corriente directa. 12) Ruedas para giro.
Los aspectos claves de la plataforma robótica educativa
Carlitos pueden enumerarse de la siguiente forma: primero, para el
desplazamiento del robot se maneja un control de bajo nivel, el cual se encarga
de controlar los motores. Segundo, el uso de un mini computador para correr
algoritmos de visión por computador para la navegación autónoma. Tercero, un
computador personal para procesar los datos con alto costo computacional y, por
último, el middleware ROS que brinda altos niveles de abstracción de hardware y
variadas funcionalidades de uso frecuente en robótica y servicios (Ver Fig. 5).
Fig. 5. Ejemplo de diagrama
de flujo de la iteración en Carlitos
La tecnología electrónica open source embebida en Carlitos
ofrece una serie de módulos de diseño libre, en donde las especificaciones y
diagramas esquemáticos son de acceso público. Lo anterior permite disminuir los
costos y la elaboración de las tarjetas por los mismos estudiantes. Se usaron
principalmente sistemas embebidos de bajo costo para el control de los
efectores (motores DC) que soportan la navegación [3] del móvil en su
espacio de trabajo. Esta parte del proyecto se encarga de interpretar y
ejecutar las instrucciones enviadas por el mini computador implementado en la
estructura. Aunque el dispositivo puede con una carga operacional más alta, se
busca desarrollar una estructura distribuida por nodos, donde cada componente
se especialice en una sección en particular.
La arquitectura de control de navegación del robot Carlitos,
está compuesta por lo menos de tres nodos principales: captura de imagen con el
Single Board Computer, control de bajo nivel de los motores por medio
del ROS serial y visualización del video en el computador. Estos nodos corren
en diferentes unidades de procesamiento, para constituir un sistema distribuido
concurrente con transferencia de datos de control y percepción en lo que se conoce
como un grafo de computación ROS.
El robot Carlitos es un robot diferencial diseñado y
construido teniendo en cuenta criterios de modularidad y escalabilidad del
hardware.
3. METODOLOGÍA
ROS-XP
El diseño de la metodología se caracterizó por ser experimental,
exploratoria e instrumental para la validación de un conjunto de métodos que
contemplan la ejecución de una serie de actividades conexas a los objetivos. La
metodología se fundamenta en tres pilares, a saber (Ver Figura 6): el primero
es una correcta planeación del proyecto para un diseño estructural y de
comportamiento basado en las historias de usuario registradas por el docente o
investigador. El segundo pilar, está constituido por iteraciones: 1) Una
planeación de la iteración. 2) Un diseño basado en algunos diagramas del
lenguaje UML (flujo y clases) combinado con diagramas [10] de nodos de ROS y
tarjetas CRC modificadas (CRCMAN). 3) El desarrollo de entregas parciales por
medio de componentes funcionales en los nodos de desarrollo. 4) Una propuesta
de pruebas que incluye la verificación de buenas prácticas para la generación
de código del proyecto en la programación orientada a objetos o servicios de
los nodos ROS. El tercer pilar, se denomina de producción y se encarga de
entregar el diagrama completo del producto desarrollado, junto con el código
respectivo, la aplicación con los ajustes necesarios y su puesta en marcha (Ver
Fig. 6).

Fig.
6.
Pilares de la metodología ROS-XP.
A
continuación, se presentan los componentes que poseen cada uno de los tres
pilares de la metodología (Ver Fig. 9).
3.1
Planeación del proyecto
Se
compone a su vez de tres etapas, a saber:
3.1.1
Historias de usuario. Son definidas por el líder con la
participación de los equipos de desarrollo, las cuales pueden ser modificadas
en cualquier momento del ciclo de vida del proyecto, si el equipo de trabajo lo
consideraba necesario.
3.1.2
Cronograma.
Se diseña el cronograma para definir el número de iteraciones que se realizaron
y las fechas de entrega de los módulos funcionales correspondientes a esas
fechas.
3.1.3
Pruebas funcionales. Se define las pruebas funcionales. Por ejemplo,
determinar el comportamiento que va a tener el robot cuando enfrenta algunos
retos.
3.2
Iteraciones
Se
compone a su vez, de cuatro etapas, a saber: Planeación de la iteración,
Diseño, Programación y Pruebas.
3.2.1
Planeación de la iteración. Como su nombre lo indica, en esta etapa se
definen los tres pasos a seguir en un rango determinado de tiempo, a saber:
-
Alcance de la iteración. La función principal es dividir el equipo de trabajo
en parejas.
-
Pruebas unitarias. El equipo de trabajo propone el alcance de la iteración,
pero el investigador líder o profesor decide finalmente las prácticas a
realizar.
-
División del equipo de trabajo. Se definen las pruebas unitarias que se
realizan en este proceso de desarrollo, es decir, desde un principio de la
iteración, los programadores tienen claro los resultados que se deben
evidenciar en cada nodo.
3.2.2
Diseño.
La metodología propuesta se diferencia de XP en que se propone un diseño
obligatorio pero sencillo, el cual maneja un grupo de diagramas como el de
clases, secuencia y computacionales de grafos de ROS. Recordemos que esta
metodología fue diseñada para programadores no muy expertos en ingeniería o
arquitectura de software; por lo tanto, los diseños deben ser sencillos, pero
de gran utilidad.
La
metodología se basa en el paradigma de la programación orientada a objetos
(POO), por lo tanto, se propone el diagrama de clases para definir la
estructura de cada nodo y el de secuencia para contemplar el comportamiento de
las clases de dicho nodo. Además, un diagrama computacional de grafos para
definir el alcance de cada iteración.
El
diagrama de clases está constituido por los objetos que afecten directamente al
nodo, en los cuales se tienen en cuenta los atributos del objeto y los métodos.
En
el diagrama de secuencia se muestra el comportamiento de las entidades
diseñadas en el diagrama de clases y el número de objetos es limitado por la
necesidad del nodo. Es decir, que un nodo debe tener el menor número posible de
objetos, pero se debe garantizar que exista al menos uno.
El
diseño debe ser evolutivo, lo que quiere decir que se hace para los nodos que
se van a entregar en cada iteración, pero estos pueden ser modificados en caso
que la práctica lo requiera. La etapa de Diseño se compone de cinco pasos, a
saber:
-
Definición de los nodos. Se divide la historia de usuario en nodos de entrada,
procesamiento y salida (Ver Figura 8).
-
Diagrama de nodos. Se realiza el diagrama de nodos de ROS correspondiente a esa
iteración.
-
Diagrama de flujo por nodos. Por cada nodo se debe realizar un diagrama de
flujo que explique el comportamiento de cada nodo relacionado a cada iteración.
-
Tarjetas Clase Responsabilidad Colaborador Método Acción Nodo (CRCMAN). Se
elabora la tarjeta CRCMAN la cual representa una clase donde se define el
nombre de la clase, las responsabilidades, el nombre del nodo donde se
encuentra, el nombre de los métodos y con qué clase está relacionada Tablas IV,
V, VI.
-
Diagrama de clase por nodos. Al final de la iteración se debe entregar el
diagrama de secuencias y de clases describiendo lo realizado en la iteración.
Para la creación de nodos se debe de tener en cuenta que los supernodos en ROS
son aplicaciones que manejan muchos eventos, con sus suscriptores, publicadores
y tópicos. Lo que hace que, si alguna parte del proceso falla, se corre el
riesgo de que el flujo de todo el sistema se detenga. Además, al reutilizar el
código se hace una labor difícil, debido a que la lectura del programa se hace
una labor compleja. Por lo tanto, ROS-XP considera que los supernodos no son
una buena idea y propone dividir los supernodos para suplir las necesidades de
todo el sistema.
ROS-XP
propone subdividir las historias de usuarios en partes que diferencien sí son
datos de entrada, salida o de procesamiento, para luego crear nodos que se
encarguen de esas partes. Por lo tanto, la metodología se adapta perfectamente
a la naturaleza evolutiva de la metodología donde la compatibilidad con los
cambios es importante en caso de que algo en el proyecto deba ser replanteado.
3.2.3
Programación.
La codificación de ROS-XP no cambia de los estándares sugeridos de XP. Esta se
basa en el paradigma de la programación orientada a objetos y las buenas
prácticas. Una de las propuestas que se sigue es la programación en pareja lo
cual permite realizar una codificación de mejor calidad, dando a que se compartan
ideas, se aprendan técnicas de programación unos de otros y se corre menos
riesgo de perder tiempo.
ROS-XP
sugiere que los miembros de la pareja o equipo estén cerca físicamente, pero
trabajan en diferentes computadores sobre el mismo código, haciendo uso de una
plataforma de desarrollo colaborativo de software para alojar proyectos
utilizando el sistema de control de versiones como GitHub.
Hacer
uso de plataformas colaborativas con control de versiones facilita el trabajo
en parejas porque se pueden hacer pruebas sobre el mismo código y verificar
cual es la mejor propuesta. Además, la implementación del proyecto se facilita
para cualquier entorno de desarrollo, debido a que se puede descargar un
proyecto con sus archivos y estructura.
Antes
de dar inicio a las actividades de programación se deben estipular las pruebas
unitarias, la cuales deben diseñarse entre el equipo y el líder.

Fig.
8.
Propuesta para la creación de nodos en ROS-XP
Los
estándares de calidad en el desarrollo de códigos son definidos por el equipo
de trabajo. No obstante, se sugiere que debe ir incorporado paradigma orientado
a objetos y que la documentación sea una guía para la reutilización de los
componentes existentes. La etapa de la Programación comprende a su vez, cinco pasos
a saber:
-
Creación del proyecto en la plataforma colaborativa. Se implementa un proyecto
para la iteración en una plataforma colaborativa.
-
Creación de los nodos. Se crea los nodos y las relaciones según el diagrama de
nodos diseñado en la iteración.
-
Clases con métodos y atributos. Se crea la estructura del código por medio de
las tarjetas CRCMAN, diagramas de clase, de nodos y de secuencia.
-
Código de los métodos de las clases. Se codifica lo solicitado en la planeación
de la iteración.
-
Código optimizado. Se optimiza el código como último paso y antes de hacer la
entrega.
3.2.4
Pruebas ROS-XP. Aquí se valida el código que se implementó en cada
iteración. Esta etapa se divide en tres pasos a saber:
-
Validación de pruebas unitarias. Se implementa una unidad de prueba para todo
método del código.
-
Validación de pruebas funcionales. Se valida el código con las unidades de
prueba antes de ser implementado.
-
Pruebas unitarias en caso de fallo. Se crea una unidad de prueba Ante un fallo.
3.3 Producción
En
este tercer pilar (Ver Fig. 7) se encarga de todo lo referente a la entrega
final del proyecto. Se divide en tres etapas a saber:
3.3.1 Ajustes. Se realizan
las adecuaciones necesarias del software entregado.
3.3.2 Diagrama
final.
Se entrega la documentación del proyecto terminado.
3.3.3 Puesta
en marcha.
Se pone en marcha el producto final.
4. RESULTADOS Y DISCUSIÓN
A
continuación, se enumeran y explican las diferentes evidencias que se
desarrollan en cada fase de la metodología ROS-XP, aplicadas al caso de estudio
de teleoperación de la plataforma robótica llamada Carlitos (Ver Fig. 6).
4.1
Planeación del proyecto
4.1.1
Historias de usuario. En esta parte se recopila los requerimientos
que se requieren implementar en la plataforma Carlitos.
-
Historia de usuario I - Iteración I. El líder informa a los “noders” del
requerimiento de un nodo que permita visualizar por medio de un terminal la
dirección en que el usuario le ha ordenado avanzar al robot.
-
Historia de usuario I - Iteración II: El líder informa a los “noders”
del requerimiento de una clase que permita crear los nodos y enviar los datos a
los topics que el usuario le ha ordenado avanzar al robot.
-
Historia de usuario III - Iteración III: El líder informa a los “noders”
que se requiere una clase que permita capturar los datos el teclado y enviarlos
a la clase comunicaciones.
4.1.2
Cronograma.
Para este caso, indica el rango de fechas en las que trabajará cada historia de
usuario (ver Tabla 2)
Tabla
2.
Representación cronograma
|
WBS
|
Name
|
Start
|
End
|
Time
|
%
|
|
1
|
El
líder informa a los “noders” del requerimiento de un nodo que permita
visualizar, por medio de una terminal, la dirección en zque el usuario le ha
ordenado avanzar al robot.
|
Jul 11
|
Jul 28
|
15d
|
10
|
|
2
|
El líder informa a los “noders” del requerimiento de una clase que
permita crear los nodos y enviar los datos a los topics.
|
Jul 31
|
Ago 15
|
15d
|
5
|
|
3
|
El líder informa a los
“noders” que se requiere una clase que permita capturar los datos el
teclado y enviarlos a la clase comunicaciones.
|
Sep 1
|
Sep 15
|
15d
|
2
|
|
4
|
Se
requiere manejar una señal de video stream del robot hacia el
computador, teniendo en cuenta que es posible que en un futuro se solicite
algún procesamiento con la imagen.
|
Sep 16
|
Sep 30
|
15d
|
0
|
4.1.3
Pruebas funcionales. Muestra sí el software se comporta según lo esperado en
la planeación, mediante dos pruebas:
-
Prueba 1. Se comprueba que al enviar ciertos comandos el sistema reacciona
respondiendo con mensajes predeterminados. Por ejemplo, al ingresar el número 8
aparece en la terminal adelante, al ingresar 4 izquierda y al ingresar 6
aparece derecha.
-
Prueba 2. Se comprueba el uso de una clase para la construcción de nodos en el
sistema que constituye la plataforma Carlitos. Por ejemplo, el cliente debe
escoger un nombre del tópico y del nodo, luego ejecutarlo y deben aparecer esos
nodos en ejecución con la herramienta Rosgraph.
4.2
Iteraciones
4.2.1
Planeación de la iteración. En esta parte se define el alcance, las
pruebas y los equipos de trabajo de cada iteración.
-
Alcance de la iteración. Se define qué historia de usuario se realiza en cada
iteración:
Historia
de usuario I - Iteración I.
Historia
de usuario I - Iteración II.
Historia
de usuario III - Iteración III.
-
Pruebas unitarias. Se diseña las pruebas que permitirán comprobar la idoneidad
del software desarrollado. Por ejemplo, para este caso se envía un número al
objeto Control y con base a dicho número, el robot debe indicar en la pantalla
si va a avanzar, retroceder o girar.
Tabla
3.
Test de la clase control
class
TesttsBasicos(unittest.TestCase):
def
test_control(self):
control=Controls()
control.ingresarOrden(8)
print(self.assertEqual("Arriba", control.avanceRobot()))
if
__name__ == '__main__':
#
begin the unittest.main()
unittest.main()
-
División del equipo de trabajo. Se muestra la división de trabajos por parejas
de diferentes asuntos que debe de resolver los desarrolladores (Ver Fig. 9)

Fig.
9.
División de trabajos por parejas
4.2.2
Diseño.
Se implementan algunos de los diagramas necesarios para implementar el
desarrollo de software de teleoperación.
-
Definición de los nodos. Se divide la historia de usuario en nodos de entrada,
procesamiento y salida, para luego crear nodos que se encarguen de esas
responsabilidades.
-
Diagrama de nodos. Se diseñan los nodos específicos de cada iteración para
implementar el software de la plataforma robótica educativa (Ver Fig. 10 y Fig.
11).
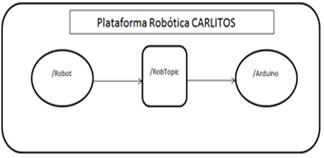
Fig. 10.
Grafo computacional de ROS primera iteración
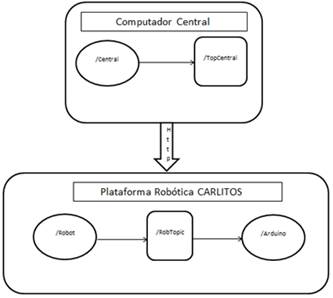
Fig.
11.
Grafo computacional de ROS segunda iteración
-
Diagrama de flujo por nodos. Representa los pasos a seguir en el algoritmo para
implementarlo en cada nodo.
Fig.
12. Captura
de datos del teclado y mostrar en pantalla
Se
muestra un ejemplo sencillo del diagrama de flujo, en el nodo /Central, en el
cual donde se muestran los datos ingresados por teclado para luego ser
mostrados en una pantalla (Ver Fig. 12). Luego, Se visualiza el mismo algoritmo,
pero los datos son enviados a un nodo diferente para ser mostrados en la
pantalla del nodo / robot (Ver Fig. 13), posteriormente este será el principio
de la teleoperación.
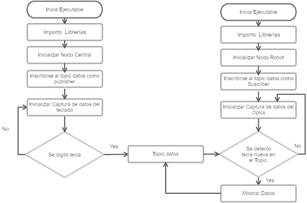
Fig.
13.
Enviar datos del nodo / central y enviarlos al nodo / robot
-
Tarjetas CRCMAN. En las tablas (Ver Tablas 4 y 5) se representan las clases con
tarjetas que contienen la información de los nodos, métodos, relaciones y
responsabilidades de la clase central y teclado que estarían en el computador
con la clase Robot (que estarían implementada en el robot)
En
la Tabla 4 se muestra la tarjeta CRCMAN de la iteración I la cual describe la
clase Control ubicada en el nodo /Robot que se encarga de interpretar los datos
que vienen de la clase de Comunicaciones para que el usuario pueda monitorear
los datos del computador, con los métodos ingresarOrden() y avanceRobot()
Tabla
4.
Tarjeta CRCMAN Iteración I
|
Nombre del nodo
|
Robot
|
|
Clase
|
Control
|
|
Colaboradores
|
Comunicaciones
|
|
Responsabilidad I (RI)
|
Interpretar los datos que vienen de la clase de
comunicaciones para que el usuario pueda monitorear los datos del computador
|
|
Método I- Responsabilidad 1 (1RI)
Ingreso de los datos recibidos por comunicaciones
|
ingresarOrden(data.data)
|
|
Método 2- Responsabilidad 2 (2RI)
muestra un mensaje dependiendo de la instrucción enviada(8-
arriba,2 -abajo,4- izquierda,6-derecha, cualquier otro alto)
|
avanceRobot()
|
En
la Tabla 5 se muestra la tarjeta CRCMAN de la iteración II la cual modela la
clase ConfigurarNodo ubicada en el nodo /Central que se encarga de facilitar la
creación de nodos y el nombramiento de los Topics, con el método
nombrarNodoPublisher(self,Nombrepublisher,Nombrenodo).
Tabla
5.
Tarjeta CRCMAN - Iteración II
|
Nombre del nodo
|
Central
|
|
Clase
|
ConfiguraNodo
|
|
Colaboradores
|
Teclado
|
|
Responsabilidad I (RI)
|
Esta Clase debe facilitar la creación de nodos y el
nombramiento de los Topics
|
|
Responsabilidad II (RII)
|
Debe permitir enviar letras tipo String por medio de esta
clase al Topic
|
|
Método I- Responsabilidad 1 (1RI)
inicializar y nombrar el nodo con su topic
|
nombrarNodoPublisher(self,Nombrepublisher,Nombrenodo):
|
A
continuación, se incorpora la tarjeta CRCMAN de la iteración III la cual
muestra la clase Teclado ubicada en el nodo /Central que se encarga de enviar
datos capturados a la clase ConfigurarNodo, para luego ser enviados al Nodo
/Robot, con el método def getchar(self).
Tabla
6.
Tarjeta CRCMAN - Iteración III
|
Nombre del nodo
|
Central
|
|
Clase
|
Teclado
|
|
Colaboradores
|
ConfiguraNodo
|
|
Responsabilidad I (RI)
|
Capturar los datos del teclado
|
|
Responsabilidad II (RII)
|
Enviar datos capturados a la clase Configurar Nodo para ser
enviado
|
|
Método I- Responsabilidad 1 (1RI)
inicializar y nombrar el nodo con su topic
|
def getchar(self)
|
- Diagrama de clase por nodos. Se representan
las clases control y comunicaciones en la (Ver Fig. 16) en el nodo Robot y el
nodo central (Ver Fig. 18) con su clase Teclado y Configurarnodo

Fig.
16.
Diagrama de clases de la primera Iteración – Nodo Central.
La
Fig. 16 representa al nodo implementado en la plataforma robótica, encargado de
recuperar los datos enviados del computador por medio de la clase
Comunicaciones.

Fig.17. Diagrama de
clases de la segunda Iteración – Nodo Central.
En
la Fig. 17 se muestra el nodo implementado en el computador donde se crea la
clase Configurarnodo que se encarga de crear el nodo / central para enviar los
datos al robot.

Fig.
18.
Diagrama de clases de la tercera Iteración – Nodo Central.
En
la Fig. 18, se agrega la clase “Teclado” al nodo / central, la cual se encarga
de enviar los datos a la clase ConfigurarNodo que se encarga de enviar los
datos al robot.
-
Diagrama de secuencias. Se representan las relaciones entre los objetos Control
y Comunicaciones del nodo Robot (Ver Fig. 19), y el objeto de la clase teclado
y configurarNodo del nodo /Central (Ver Fig. 20).
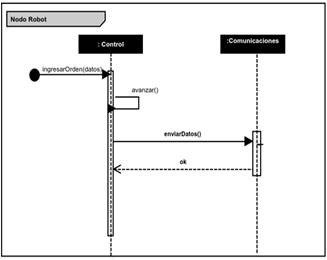
Fig. 19. Diagrama de secuencia
para desarrollar la primera Iteración.
En
la Fig. 19, se aprecia el comportamiento de la clase Control que se encarga de
recibir los datos a la clase Comunicaciones, que, a su vez, se encarga de
recuperar los datos del topic.
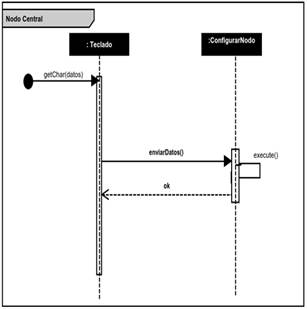
Fig
20.
Diagrama de secuencias de la tercera Iteración.
En
la Fig. 20, se muestra el comportamiento del nodo /Central que se encarga de
enviar datos al topic.
4.3
Programación.
La codificación para este caso es implementada en la plataforma colaborativa
GitHUB
4.3.1
Creación del proyecto en la plataforma colaborativa
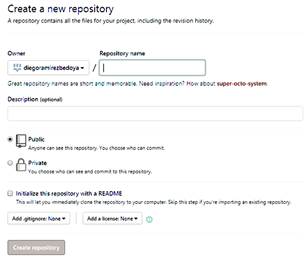
Fig. 21. Formulario para la
creación del repositorio en GitHub.
Se
utiliza la plataforma GitHub para la elaboración del proyecto donde se
implementa el desarrolla el software para la teleoperación de la plataforma
robótica Carlitos.
4.3.2
Creación de los nodos. Código en Python para crear nodos
publicadores (Ver Tabla 5)
En
la Tabla 5 se muestra el código necesario para crear un nodo sin incorporarlo
en una clase (Ver Tabla 5)
Tabla
5.
Código Python para crear nodos Publisher
if not rospy.is_shutdown():
rospy.loginfo(datoDelTeclado)
self.pub.publish(datoDelTeclado)
self.rate.sleep()
return True
else:
return False
4.3.3
Clases con métodos y atributos. Codificación básica de las clases
diseñadas con sus métodos y atributos (Ver Tablas 6, 7 y 8).
En
la Tabla 6 se muestra el código de la clase Control con sus atributos y
métodos.
Tabla
6.
Código Python de la clase Control
class Controls(object):
orden='5'
def ingresarOrden(self,orden):
def avanceRobot(self):
En
la Tabla 7 se presenta el código de la clase ConfiguraNodo con sus atributos y métodos,
la cual se encarga de publicar el nodo.
Tabla
7. Código Python de la clase configuranodo
class ConfiguraNodo:
def nombrarNodoPublisher(self,nombrPublisher,nombreNodo):
def execute(self,datoDelTeclado):
En
la Tabla 8 se muestra código de la clase Teclado con sus atributos y métodos,
la cual se encarga de publicar el nodo.
Tabla
8.
Código Python de la clase Teclado
class Teclado(ConfiguraNodo):
def __init__(self, publisher,nodo):
def enviarDatos(self, datosTeclado):
4.3.4
Código de los métodos de las clases. Se visualiza la clase
Control desarrollada para enviar mensajes según la captura de números
específicos (Ver Tabla 9).
Tabla
9.
Código Python de la clase Control
class Control(object):
orden='5'
def ingresarOrden(self,orden):
self.orden=orden
print 'orden',self.orden
def avanceRobot(self):
if self.orden =='8':
print 'Arriba'
elif self.orden=='2':
print 'Abajo'
elif self.orden=='4':
print 'Izquierda'
else:
print 'Derecha'
print 'avance',self.orden
A
continuación, se presenta el código necesario para la clase CreacionNodo que se
encarga de implementar el nodo / central ubicada en el computador (Ver Tabla 10).
Tabla
10.
Código Python de la clase configuranodo
class ConfiguraNodo:
def nombrarNodoPublisher(self,nombrPublisher,nombreNodo):
self.pub = rospy.Publisher(publisher,
String, queue_size=10)
rospy.init_node(nodo, anonymous=True)
self.rate = rospy.Rate(10) # 10hz
def execute(self,datoDelTeclado):
if not rospy.is_shutdown():
rospy.loginfo(datoDelTeclado)
self.pub.publish(datoDelTeclado)
self.rate.sleep()
return True
else:
return False
Código
completo de la clase KeyBoard.
Tabla
11.
Código Python de la clase Key
class
KeyBoard(ConfiguraNodo):
def
__init__(self, publisher,nodo):
ConfiguraNodo.nombrarNodoPublisher(self, publisher,nodo)
def
enviarDatos(self, datosTeclado):
ConfiguraNodo.execute(self, hello_str)
def getchar(self):
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try:
tty.setraw(sys.stdin.fileno())
hello_str = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return
hello_str
4.4
Pruebas ROS-XP
4.4.1
Validación de pruebas unitarias

Fig.
22.
Validación de que la clase Teclado funciona correctamente.
4.4.2
Pruebas unitarias en caso de fallo
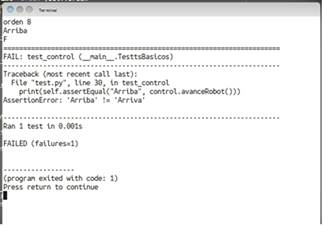
Fig.
23.
Pantallazo que muestra la prueba fallida de la clase Teclado.
4.5
Producción
En
esta parte se entrega el proyecto completo con el diagrama final y la
aplicación funcionando.
4.5.1
Ajustes. Se
cambia el tiempo entre fotograma para mejoramiento del video.
4.5.2
Diagrama final. Finalmente se plasma el gráfico (Ver Fig. 24)

Fig.
24. Diagrama
final con todos los nodos necesarios del proyecto
4.5.3
Puesta en marcha. Lista de verificación del software donde se puede apreciar,
entre otras cosas, la captura de video desde la plataforma robótica y enviada al
computador por medio de ROS (Ver Fig. 25).
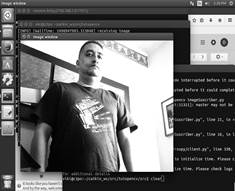
Fig.
25. Video
enviado desde el nodo / robot de la plataforma robótica a al nodo central
Los
resultados de la metodología inician en la iteración, con una historia de
usuario, para luego implementar el diseño. La arquitectura es sencilla, dado
que predomina un grupo de diagramas como el de clases, secuencia y los grafos
computacionales de ROS. El uso de las tarjetas CRCMAN incorpora el nombre de
los nodos y métodos con sus responsabilidades.
Se
aprecia una notable diferencia a otras metodologías como es el caso de la MDASR
(Metodología de Desarrollo de Arquitectura de Software para Robots) debido a
que utiliza el proceso unificado de desarrollo de software (PU), el cual usa el
modelo predictivo para la construcción de aplicativos informáticos [11]. Por lo
tanto, exige una rigurosidad en la planeación y el diseño porque busca obtener
una predicción del comportamiento robótico, diferente a lo propuesto al trabajo
presentado en este artículo dado que el diseño puede cambiar a medida que
avanza el proyecto.
También
se compara la metodología propuesta con la aproximación basada en UML para el
diseño y codificación automática de plataformas robóticas manipuladoras de la
Universidad de Jaen [12], que a diferencia de lo que plantea los autores de
ROS-XP, reemplaza el grafo computacional por un diagrama de componentes, lo
cual es aconsejable para desarrolladores en ingeniería de software, pero puede
confundir a ingenieros o técnicos acostumbrados a trabajar con los diagramas o
conceptos propios del ROS. Además, su enfoque no está orientado a un marco de
trabajo para el desarrollo de software.
El
resultado final del procedimiento sugerido por ROS-XP es un código en lenguaje
Python implementado en los métodos de una clase. Lo anterior es aprovechando el
diagrama de clases que define la estructura de cada nodo y el de secuencia, que
contempla el comportamiento de las clases. Vale destacar, que los diagramas
están constituidos por las entidades que afecten directamente cada nodo.
5. CONCLUSIONES
La
metodología presentada en este artículo se diferencia de XP en que el diseño es
obligatorio, pero sencillo el cual maneja un grupo de diagramas como el
diagrama de clases, secuencia y diagramas computacionales de grafos de ROS. La
modificación de la metodología XP (principalmente en la fase de diseño) permite
adicionar documentación necesaria para darle rigurosidad a los desarrollos para
la investigación.
El
diagrama de clases está constituido por los objetos que afecten directamente al
nodo, en los cuales se tienen en cuenta los atributos del objeto, y los
métodos. El diseño es evolutivo, es decir que se hace para los nodos que se van
a entregar en cada iteración, pero estos pueden ser modificados en caso que la
práctica lo requiera. La modularidad del código permite hacer cambios más
rápidamente y concuerda totalmente con la modalidad iterativa e incremental que
se ha sugerido durante todo el proyecto. Además, se ha adaptado eficientemente
según el modelo de línea de la investigación en robótica. La teleoperación
permitió entender cómo configurar ROS para la comunicación entre nodos, el
envío de mensajes en diferente máquina, el manejo de aplicaciones distribuidas
con ROS, configuración de la red, captura, procesamiento y el envío y
visualización de imágenes.
El
hecho de dividir las historias de usuario en entrada, procesamiento y salida
genera un aumento de los números de nodos, lo cual es necesario para mejorar la
cohesión y extensibilidad en la comunicación de los mismos. Por tanto, el
desarrollador se ve obligado a que cada clase tenga relación directa con la
función para la cual fue diseñada.
El
caso de estudio de teleoperación permitió entender cómo configurar ROS para la
comunicación entre nodos, el envío de mensajes en diferente máquina, el manejo
de aplicaciones distribuidas con ROS, configuración de la red, captura,
procesamiento y envío y visualización de imágenes.
A
futuro se espera contemplar una segunda fase donde se aplique la metodología
ROS-XP para el desarrollo software de muebles robóticos, que puedan dar soporte
a pacientes con limitaciones de movilidad y, así, mejorar la calidad de vida de
las personas que se identifican con la forma de los muebles, a fin de
disminuir el posible trauma que pueda causar la incorporación de estos equipos
en el hogar.
6.
Agradecimientos
Agradecemos al Doctor Carlos Mario Sierra Duque de la Universidad de
Antioquia por su asesoría metodológica para la realización de este proyecto. También
expresamos los agradecimientos al profesor Gustavo Alonso Acosta Amaya por sus
valiosos aportes y al Sistema de Innovación e Investigación del Servicio
Nacional de Aprendizaje (SENA), así como al grupo de articulación de la media
técnica del Centro Tecnológico del Mobiliario de la misma institución.
7. Referencias Bibliográficas
[1] T. Acharya y R.
Ajoy, Image Processing- Principles and Applications, Arizona: John Wiley &
Sons, 2005.
[2] A. Martínez y E.
Fernández, Learning ROS for Robotics Programming, Birmingham - Mumbai: Packt,
2013.
[3] J. Lentin,
Learning Robotics Using Python, Birmingham: Packt Publishing Ltd, 2015.
[4] J. Rapado, Diseño
e implementación de una interfaz gráfica de usuario para mapeado de entornos y
navegación en ROS. Valencia, 2016.
[5] S.R. Chidamber,
D.P. Darcy, C.F. Kemerer, "Managerial use of metrics for object-oriented
software: an exploratory analysis", Software Engineering IEEE Transactions
on, vol. 24, no. 8, pp. 629-639, 1998.
[7] K. Beck, Extreme
programming eXplained: Embrace change. Reading, MA: Addison-Wesley. Extreme
programming eXplained: Embrace change. Reading, MA: Addison-Wesley, 2000.
[8] G. Martin,
"UML for embedded systems specification and design: motivation and
overview", Design Automation and Test in Europe Conference and Exhibition
2002. Proceedings, pp. 773-775, 2002.
[9] Stewart Baird,
"Teach Yourself Extreme Programming in 24 Hours[M]", SAMS, 2003.
[10] P. Letelier,
"Metodologías ágiles para el desarrollo de software: eXtreme Programming
(XP)," Técnica administrativa, vol. 5, pp. 26, June2006[Online].
Available:https://dialnet.unirioja.es/servlet/articulo?codigo=1983605
[11] N. Ospina,
Arquitectura software para robots móviles aplicando la metodología MDASR.
Avances en Sistemas e Informática, vol. 6, no 3, p. 133-144,2009.
[12] A. Sánchez, J. Gámez, J. Gómez, An
UML based approach for designing and coding automatically robotic arm
platforms, Revista Iberoamericana de Automática e Informática industrial, vol.
14, no. 1, pp. 629-639, 2017.
