1.
INTRODUCCIÓN
En
los últimos años numerosas industrias manufactureras se han estado modernizando
y esto se ha reflejado no solo en la adquisición tecnológica, sino también en
la capacidad de llevar todo el volumen de información generado en los procesos
hacia los sistemas de gestión, permitiendo consultar el estado de la planta en
todo momento, y consecuentemente, habilitando toda la maquinaria para el
intercambio de información entre ellas, lográndose así la migración de todo un
proceso hacia lo que hoy en día se conoce como la Industria 4.0 (Samaranayake
2017) [1],
que no es nada más que la cuarta etapa de las tres revoluciones industriales
predecesoras, como se muestra en la figura 1. En síntesis, la Industria 4.0 es
una visión de los servicios interconectados para facilitar la innovación y la
capacidad de visualizar datos de fabricación, a fin de descubrir nuevas
perspectivas para una mayor ventaja competitiva en el sector manufacturero (Hill
2017) [2]. Sin embargo, para llegar a dicho nivel en relación al transporte de
mercancía de un sitio a otro y compartiendo información en tiempo real del
estado del producto, es necesario estar preparado tecnológicamente, teniendo en
cuenta que el mismo nivel de automatización no es asimilado en la logística,
donde típicamente los trabajos desempeñados en esta área son realizados por
operadores humanos y equipos de accionamiento manual (Vasiljević 2016)
[3],
sin contar los momentos en que se debe transportar la mercancía de un lugar a
otro ya sea por la necesidad de almacenarlos, o porque deben recorrer todo el
proceso para ser empacados y despachados al usuario final (Chen 2017) [4].
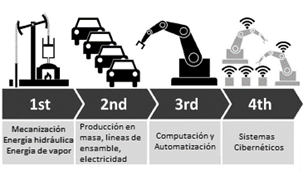
Figura 1. Etapas de desarrollo de
la revolución industrial (Hill 2017) [2]
Adicionalmente
hay que tener en cuenta la infraestructura del local y distribución interna de la
maquinaria ya que esto tiene gran impacto al momento de instalar, ejecutar y/o
modernizar cualquier tipo de planta industrial (Wang 2015) [5], y más para
aquellos procesos que están enfocados en mover o transportar productos de un
sitio a otro dentro de su flujo productivo. En ese orden de ideas, existen
diferentes tipos de soluciones que permiten trasladar materia prima, productos,
mercancía, etc., de un lugar a otro de forma manual o automática. Particularmente,
los vehículos de guiado autónomo (AGV) cumplen con esta función, en donde tienen
un campo diversificado de aplicaciones que se expande con el tiempo. Los
sectores comerciales de aplicación incluyen terminales de contenedores,
sistemas de fabricación flexible, almacenes logísticos, agricultura,
operaciones militares, gestión de la salud, entre otras (Bechtsis 2017) [6], (Bostelman 2016) [7].
De
acuerdo a lo anterior, al momento de diseñar un AGV se debe tener en cuenta las
características claves que debe cumplir el vehículo de acuerdo al entorno donde
se desempeñará (Le-Anh 2006) [8], por ejemplo, si se quiere
transportar material o mercancía pesada de forma automática y sin dependencia
humana en un centro logístico, se podria elegir una monta-carga autónoma el
cual se ajusta perfectamente para realizar dicha tarea (Andreasson 2015) [9]. En
tal sentido, es relevante también seleccionar una adecuada técnica de control para
la navegación. Por ejemplo, la lógica difusa es una de ellas, debido a que las
reglas heurísticas se actualizan fácilmente y abordar nuevas características
que mejoran el desempeño del sistema y por otro lado, el PID (Por sus siglas en
inglés: Proportional-Integral-Derivative) también se utiliza en muchos
sistemas de control automático, ya sea con parámetros estáticos o dinámicos (Shakya 2014) [10] como
en los actuadores de un AGV. Del mismo modo, un método combinado de ambos es
adecuado para aplicaciones industriales (Zulfatman 2009) [11] o en
un AGV que conserve una velocidad constante independiente de la variación del
peso de producto a trasladar (Riesa 2017) [12].
En
esta revisión de literatura se estudian los vehículos de guiado autónomo para
la solución del transporte de mercancía y productos en diferentes sectores,
haciendo especial énfasis en el sector industrial, y su relación con la
industria 4.0.
El
documento se organiza de la siguiente manera: luego de la introducción, en la
segunda sección se explica la terminología básica usada en el diseño de un AGV.
En la tercera sección se presentan aspectos del estado del arte en donde se
explicará la aplicabilidad de esta tecnología desde la identificación del lugar
de implantación, desempeño en diferentes entornos de trabajo, algunas técnicas
de control y navegación usadas en los AGV y se hace énfasis en el software ROS (por
sus siglas en inglés: Robot Operating System). Posteriormente en la
cuarta sección se hace un análisis del material revisado. Finalmente, se
presentan las conclusiones que se hallaron en el desarrollo del presente
documento.
2. MARCO
REFERENCIAL
Existen
diferentes formas de transportar materia prima de un sitio a otro ya sea de
forma manual, semiautomática o automática. Una de estas maneras es utilizando un
vehículo de guiado autónomo definido como “robot móvil controlado por un
computador, utilizado para el transporte de material” (Echeverri 2012) [13], (Vis
2006) [14]. Las principales áreas de aplicación de estos dispositivos se
encuentran en la intralogística, concretamente en la organización, control,
ejecución y optimización de flujos internos de bienes y materiales, canales de
información y transferencia de mercancías en la industria, el comercio y las
instituciones públicas (Gunter 2015) [15].
Hay
que tener en cuenta en el contexto de la Industria 4.0, se pueden encontrar
múltiples desafíos. En primer lugar, las implementaciones actuales de los AGV generalmente
no son capaces de adaptarse al entorno de la industria donde se ejecutan sistemas
de manufactura flexible (FMS). En segundo lugar, la visibilidad en tiempo real
de la ubicación, la trayectoria y las colisiones apenas se informan (Theunissen 2018) [16].
Por lo anterior, se hace necesario que los AGV tengan la capacidad de compartir
información en todo momento del estado actual, o por lo menos, como lo requiera
el proceso, de manera que se pueda consultar a través de una interfaz amigable
y de diferentes dispositivos como teléfonos celulares y computadoras personales
y esté disponible para los usuarios interesados y dueños de un proceso
productivo (ver figura 2).
Adicionalmente,
en el marco de la Industria 4.0 este tipo de robots, han venido siendo
adaptados bajo este concepto de ciberindustria, por lo que se hace necesario
diferentes modificaciones que tengan en cuenta variables como peso, carga útil,
velocidad de movimiento o incluso más cantidad o tecnologías de sensores que
lleven a los fabricantes de AGV’s a diseñarlos y construirlos bajo cierta
normatividad. Para ello hay normas como la ISO 10218, la TS-15066 publicada en
el año 2016 el cual ayuda al desarrollador a verificar y gestionar el riesgo en
la interacción humano-robot (Chen 2017) [17].
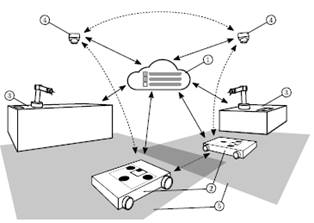
Figura 2. AGV en el contexto de
la Industria 4.0. (2) AGV’s transmitiendo información a sensores (4) y a la
nube (1), (3) FMS compartiendo datos con la nube (Van 2018) [18].
Es
importante mencionar también que cada AGV, de acuerdo al ambiente donde se va a
desempeñar, está construido específicamente para una tarea particular. En otras
palabras, es importante tener en cuenta los espacios y las características de
los productos que se van a transportar de un sitio a otro para un diseño y
construcción adecuada de cada robot a implementar. Hay que resaltar que también
se debe pensar más allá al momento de realizar dicho diseño, por ejemplo, si se
quiere construir un vehículo que cumpla con especificaciones para conectarse
con otro tipo de dispositivos o bases de datos (Industria 4.0), así el proceso
no se encuentre preparado para ello, pensando en que a futuro si se pueda
hacer. Un ejemplo de lo mencionado anteriormente se puede observar en la figura
3.
Debido
a este amplio margen de aplicaciones, se debe tener en cuenta los siguientes aspectos:
número de vehículos que va a comprender el sistema, diseño de trayectorias,
adaptabilidad al entorno de trabajo, tipo y cantidad de material a transportar
teniendo en cuenta el cómo, cuándo y dónde realizará la carga y descarga de
este, manejo de las baterías de los vehículos y cuáles serán los sistemas de
seguridad que evitarán las posibles colisiones que afecten la integridad del
sistema y por ende a él o los usuarios con quienes va a interactuar (Vis 2006)
[14] , (Zapata 2015) [19].

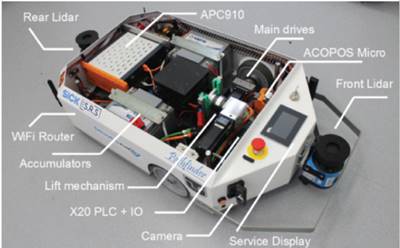
Figura 3. Algunos componentes
mecánicos, electrónicos y de comunicación que usa un AGV y lo prepara para la
Industria 4.0 (Bacik 2017) [20].
De
ahí que autores como (Vis 2006) [14] y (Kumar Das 2016) [21] se
preocupen por realizar un diseño previo del AGV de acuerdo al sitio de aplicación,
no sin antes hacer una definición previa de algunos términos que son estándar
para cualquier vehículo a desarrollar. Los términos que define a groso modo
son los siguientes:
·
Trayectoria:
Se
define como las rutas guiadas fijas en las que los vehículos pueden viajar a
los diversos puntos de recolección y entrega de cargas. Se debe tener en cuenta
que estas pueden ser físicas o virtuales (Walenta 2017) [22].
·
Gestión
de tráfico: Reglas necesarias para evitar colisiones y situaciones de
estancamiento en las que dos o más vehículos están bloqueados por completo.
·
Ubicación
de los puntos de recolección y entrega: Los puntos de recogida
y entrega conectan la red AGV, por ejemplo, máquinas, estaciones de carga,
estaciones de inspección y lugares de almacenamiento.
·
Requerimientos
del vehículo: Son las características que debe tener el AGV mínimamente
para encajar de forma aceptable en el sistema (tamaño, forma, sensores, sistema
de guiado, programación, entre otros).
·
Gestión
del AGV: Son
las normativas de control que satisfacen las demandas de transporte lo más
rápido posible y sin que haya conflictos entre vehículos. Por lo tanto, al
menos las siguientes actividades deben ser realizadas por un controlador del
sistema: Despacho del vehículo, rutas para el vehículo, programación del
vehículo y posicionamiento de vehículos inactivos.
·
Aspectos tecnológicos: Son los aspectos que al
modelar los AGV, se deben tener en cuenta ya que son las características
específicas de los sistemas automatizados. Básicamente son dos, primero, los
vehículos sin conductor, generalmente usan baterías y deben cargarse o
cambiarse y segundo, el tiempo requerido para realizar estas operaciones, los
cuales puede afectar el rendimiento del sistema.
3. ESTADO DEL
ARTE
El
objetivo de esta revisión es orientar al lector en algunos criterios para la
implementación de AGVs, de acuerdo a unas características específicas del
sitio donde se desea operar el vehículo. Para lograrlo, se hizo una búsqueda de
cada documento de acuerdo a cuatro aspectos que se consideran importantes para
realizar una implementación de este tipo de tecnología. En primer lugar la identificación
del sitio, segundo, la aplicación del AGV en diferentes entornos, en donde hay
que tener en cuenta temas logísticos, constructivos e infraestructura, en
relación a cableado eléctrico, contratación de terceros para dichos movimientos
y adecuación del lugar para disposición de maquinaria, debido a que no es tan
sencillo mover dichos equipos para la implementación de un sistema de
transporte autónomo. En tercer lugar, control del AGV, en donde es importante
mencionar algunas técnicas de control empleadas en el desarrollo de este tipo
de tecnología y finalmente en cuarto lugar, el entorno de software para la
programación de AGV’s con diferentes aplicaciones industriales, haciéndose
particular énfasis en ROS para la programación de diferentes tipos de robot
como un software estándar que facilita, agiliza y se está fortaleciendo
globalmente para el desarrollo de nuevas tecnologías en el campo de la robótica
(Garber 2013) [23].
3.1.1
Identificación
de instalaciones industriales y planificación de rutas.
Para
cualquier tipo de proyecto que se quiera ejecutar en un entorno industrial, generalmente
es muy importante hacer un reconocimiento de las instalaciones para así
determinar si es viable o no la implementación de la solución al problema
planteado. Sin embargo, autores como (Drira 2007) [24] van un poco
más allá de no solo evaluar las instalaciones industriales, sino de diseñar a
priori la distribución de la maquinaria, rutas de acceso, iluminación del
recinto, entre otros. Básicamente este autor parte del diseño de las
instalaciones, debido a que un mal diseño puede impactar considerablemente en
el rendimiento del flujo de producción. Por lo anterior, propone un marco de
trabajo general donde se describen criterios para el diseño de la disposición y
caracterización de los sistemas de manufactura, teniendo en cuenta
consideraciones estáticas y dinámicas, representaciones continuas y discretas,
formulación de problemas y enfoque de resoluciones. Sin embargo, hay que
considerar que algunos diseños se centran en determinar solo la posición
espacial de las instalaciones, dejándose a un lado la elección del tipo de
recurso de fabricación o transporte, diseño de las celdas de trabajo, entre
otros.
Teniendo
lo anterior en mente, la metodología de diseño de disposición de instalaciones
es uno de los aspectos principales a tratar para un funcionamiento eficiente y
económico de un sistema automatizado de vehículos guiados (Gutta 2018) [25]. Según este
autor, para los fabricantes de EE. UU se reduce entre un 10% y un 30 % del
costo total de manejo de materiales debido a un diseño eficiente de las instalaciones.
El diseño de la disposición de las instalaciones se clasifica en diseño de la
infraestructura, puntos de recolección y entrega, y el diseño de la trayectoria
de flujo. Por tal razón, (Gutta 2018) [25] propone dividir en el diseño
el espacio de trabajo en un conjunto de polígonos complejos conocidos como
celdas, logrando así un funcionamiento secuencial adecuado de un sistema de
fabricación debido a que el diseño se combina con el sistema de flujo de
materiales. Sin embargo, dada la naturaleza única de los sistemas de
fabricación, las tecnologías en evolución y el hecho de que no siempre se
cuente con la oportunidad de diseñar las instalaciones de acuerdo a las
necesidades del flujo productivo, se deben desarrollar técnicas lo suficientemente
robustas que permitan que el AGV se adapte al sitio donde transite.
Siguiendo
con la línea anterior, hay autores que también identifican el diseño de las
instalaciones industriales como uno de los principales cuellos de botella en el
tiempo de implementación de este tipo de vehículos. Este es el caso de (Beinschob 2017) [26],
el cual argumenta que el largo tiempo de ejecución tiene varias razones: en las
instalaciones de planta de última generación, la infraestructura designada
sigue siendo necesaria para la localización; el proceso de mapeo requiere de
personal altamente calificado y, en cualquier caso, la información de posición
no disponible o inapropiada de los puntos de entrega para los productos, debe
ser corregido en sitio. En total, la configuración de una planta para estar
lista para la operación de un AGV está tomando varios meses, vinculando a
técnicos altamente calificados e involucrando procedimientos in situ muy
costosos y que requieren mucho tiempo. Por lo tanto, (Beinschob 2017) [26] presenta un
enfoque para el despliegue de un AGV que tiene como objetivo reducir drásticamente
el tiempo, el costo y el personal involucrado. En primer lugar, propone el
empleo de una novedosa tecnología de escaneo láser SICK 3D preparada para la
industria con el fin de construir una representación virtual precisa y coherente
de todo el entorno del almacén. Mediante la utilización de una segmentación y
un procesamiento adecuado, se genera un mapa semántico que contiene posiciones
georreferenciadas en 3D, así como un mapa de localización 2D que elimina la
necesidad de una solución dedicada al mapeo 2D. Por ejemplo en la figura 4 se
presenta un mapa 3D con gráfico de características de un almacén industrial, la
línea roja es la trayectoria estimada, las líneas amarillas son los bordes
entre la posición actual y los puntos de características relacionados, los
grises son puntos de escaneo. Las líneas de cuadrícula gris claro marcan
distancias de 50 m. En segundo lugar, el mapa semántico proporciona un mapa de
espacio libre que se utiliza como base para la creación automática de la ruta
con el fin de lograr un flujo óptimo. Aunque la intervención humana sigue
siendo necesaria en varios pasos, incluido el diseño de la trayectoria para el
mapeo, la conducción del vehículo de mapeo, la verificación de la consistencia
del mapa, correcciones manuales ocasionales en el gráfico y la definición de
regiones de interés para la extracción del elemento del mapa semántico. Por lo
tanto, la metodología propuesta por (Beinschob 2017) [26] se define
como semi-automatizada.
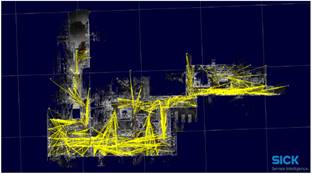
Figura 4. Mapa 3D (Beinschob 2017) [26].
Otros
autores proponen diversas soluciones que ayudan a implementar un sistema de
vehículos autónomos en zonas o procesos donde ya no es posible diseñar la
infraestructura o el local, debido a que se diseñó a priori al proyecto
tecnológico a ejecutar. Dadas estas circunstancias, algunos hallazgos
significativos han sido seleccionar un modelo de navegación que se ajuste
fácilmente no solo al vehículo sino también al ambiente de trabajo donde va a
operar. Algunos estudios primarios muestran la viabilidad y la practicidad del
uso de RFID (por sus siglas en inglés: Radio Frequency Identification)
para el posicionamiento de AGV’s en industrias de manufactura típica, usando
lectores y etiquetas en el entorno del proceso a fin de facilitar la logística
automática a través de un controlador remoto (Lu 2017) [27]. Otra manera
de utilizar este tipo de tecnología en los AGV es implementándolo como un
sistema de seguimiento de posición en interiores basado en un algoritmo de
seguimiento preciso a través de puntos de referencias cercanos al vehículo
(Saab 2011) [28], es clave el enfoque de localización y navegación que debe ser
altamente flexible para tratar aplicaciones industriales complejas, y más si se
desea aplicar el RFID, como etiqueta o antena (Lu 2018) [29], donde la
selección de dicho elemento es de suma importancia, en primer lugar, si se
elige etiquetas como medio de navegación, el área de lectura cobra cierta
relevancia debido a que el lector recibirá más o menos radiación o energía
reflejada según la posición del elemento pasivo. En segundo lugar, si se elige
la antena como medio de navegación, se debe obtener la función direccional y el
ancho del haz para que el sistema funcione en un entorno estable. Pese a que
esta tecnología ayuda en gran medida a la navegación y el posicionamiento del
vehículo en la planta, la velocidad de conducción, el tamaño de AGV, el
entorno, la capacidad de cálculo y muchos otros factores pueden influir en la
precisión de posicionamiento del sistema de RFID (Lu 2017) [27] – (Lu 2018) [29].
Por
otro lado, autores como (Hartmann 2014) [30] desarrollan
un sistema de cronogramas para AGV’s dentro de diferentes ambientes de sistemas
de manufactura flexible (FMS por sus siglas en inglés: Flexible
Manufacturing System) usando algoritmos genéticos (GA por sus siglas en inglés:
Genetic Algorith). Básicamente cuando se ingresa un cromosoma, el
algoritmo genético trabaja sobre él y produce la misma cantidad de cadenas de
desconexión, adicionalmente, el número de iteraciones tiene lugar hasta que se
obtiene la solución óptima. De ahí que se puedan apreciar varias ventajas
inherentes como la posibilidad de determinar el procesamiento de tiempo para el
AGV, tiempo de viaje de cada trayecto, tiempo de finalización de la operación y
tiempo de finalización de trabajo.
En
(Kang 2013) [31] se
realiza una aplicación de un método de visión por computadora para adquirir
información básica y así controlar un grupo de AGV’s. En primer lugar, se
diseñan unos marcadores con significados especiales (como "Ir recto",
"Giro a la izquierda", "Giro a la derecha" y
"Parar"). En segundo lugar, usa una cámara para capturar los
marcadores, usando la función HOG (Por sus siglas en inglés: Histograms of
Oriented Gradients) y clasifica los marcadores con una máquina de soporte
vectorial (SVM por sus siglas en inglés: Support Vector Machines).
Después calcula la distancia y el ángulo de desviación desde los marcadores hasta
el AGV. Finalmente, se envía la información al AGV controlando los movimientos del
mismo. Se debe tener en cuenta que la cámara debe tener una buena resolución y
adicionalmente la intensidad de luz juega un papel fundamental en el
reconocimiento de los marcadores, debido a que en un lugar poco iluminado se
puede dar errores de navegación del vehículo (Kang 2013) [31].
Finalmente,
en (Valencia-Hernández 2017) [39] se presenta un estudio donde se aplica
realidad aumentada para representar obstáculos virtuales en la navegación real
de un robot móvil. Mediante este sistema se podría hacer pruebas en plantas de
producción, almacenes logísticos o bodegas industriales de la implementación de
AGVs sin tener la totalidad de los equipos reales en el sitio, ya sea porque no
se han adquirido, o se están trasladando desde otro sitio, con lo cual no se
pierde tiempo esperando a tenerlos todos, y se podrían hacer pruebas de identificación
de instalaciones industriales, planificación de rutas y navegación. También
puede ser una buena herramienta para probar diversas fases del diseño de las
instalaciones nuevas, antes de que estén completamente terminadas.
3.1.2
Implementación
del AGV en diferentes entornos de trabajo.
Proporcionar soluciones para el transporte de
materia prima dentro de recintos cerrados no es el único beneficio que se
obtiene al desarrollar un proyecto con este tipo de característica. Es de
notarse también que este tipo de tecnologías tiene un gran margen de
aplicabilidad en otras áreas, como por ejemplo en el sector urbano. Este es el
caso de (Osman
2017)
[32] el cual
aborda la confiabilidad operativa y la seguridad de los vehículos de guiado autónomo
a lo largo de las carreteras, en donde se requiere una integración muy estrecha
entre la detección ambiental y el control de la dinámica del vehículo. Esto se
basa en determinar los límites relevantes en un carril, utilizando una cámara
convencional y una estrategia de control lateral y longitudinal limitada para
un AGV cuya dinámica se describe mediante un modelo no lineal con dos entradas,
el torque del eje trasero y el torque de dirección angular. El objetivo
es controlar el AGV para seguir una trayectoria deseada mientras se evita la
salida del carril. Para este propósito, se utiliza un algoritmo basado en
visión para determinar los límites de los carriles de la carretera con respecto
al vehículo, luego se genera una trayectoria de referencia dentro de estos
límites basados en las funciones básicas de Hermite. Las entradas
de control para el AGV se diseñan posteriormente de tal forma que rastrea la
trayectoria dada mientras su posición permanece en los límites del carril. Para
lograr esto se abordan dos enfoques, uno basado en características y el otro en
el modelo. El primero tradicionalmente utiliza la segmentación de imágenes para
detectar los carriles. Sin embargo, este método no impone restricciones en las
formas del carril, lo que puede causar una detección de carril defectuosa
debido a la oclusión o al ruido. El segundo método utilizado por (Osman 2017) [32], representa
el carril utilizando modelos matemáticos.
Otra aplicación de los AGV es en el sector de
la salud, más propiamente en las clínicas y hospitales, tal como el que se
observa en la figura 5 (Bacik 2017) [20].
Actualmente la demanda de robots móviles y su uso en hospitales se ha
incrementado debido a los cambios en las tendencias demográficas y el control
de los costos médicos. Para instalaciones de salud, estos sistemas automáticos
están diseñados específicamente para manejar materiales granulados,
medicamentos de farmacia, muestras de laboratorios, suministro central y
transporte de alimentos, platos sucios, ropa de cama, desechos (biológicos,
reciclables), instrumentos biomédicos, etc. (Pedan 2017) [33] ha
visualizado que automatizar estos suministros, permite la transferencia de
recursos humanos a otros departamentos o actividades. Los sistemas
automatizados funcionan las 24 horas del día, los 7 días de la semana. La
solución automatizada puede agilizar el flujo de tráfico de material en el
hospital, controlar los costos y reducir la carga de trabajo. La instalación
operativa del hospital debe cumplir algunos requisitos importantes, tales:
seguridad y calidad clínica, productividad, fácil de usar por pacientes,
familias y personal de la clínica, servicio de salud excelente y utilización
efectiva de la tecnología como información y manejo del paciente (Pedan 2017) [33]. Estos
requisitos y el uso de sistemas logísticos modernos afectan significativamente
el funcionamiento de toda la instalación y su economía, mejoran la calidad de
la atención del paciente y aumentan su seguridad.
Sin embargo, (Pedan 2017) [33]
también menciona que la evaluación económica realizada indica que los AGV
actualmente no son económicos y solo son asequibles para instalaciones más
grandes que se administran con fines de lucro. Un trabajo similar presenta (Acosta
2015) [34], el cual
menciona la importancia de mejorar el flujo de trabajo del personal de salud.
Por esta razón propone el despliegue de un vehículo automatizado que ayude a la
productividad de las tareas logísticas dentro de un hospital, como la
recolección y entrega de productos, así el personal puede enfocarse en las
tareas necesarias para servir mejor a la comunidad. En ese orden de ideas
(Acosta 2015) [34] propone desarrollar estaciones internas en donde
primeramente se crea un mapa de cada piso del local y posteriormente se indica
donde quedará ubicada cada estación, adicionalmente es posible indicar lugares
de interés, puntos de recolección y entrega, para que el AGV navegue de forma
autónoma dentro del recinto (ver figura 6). Esto reduce el costo adicional
dibujando las líneas o trayectos en el suelo. Adicionalmente, el AGV es capaz
de interactuar o navegar de forma segura con los usuarios del hospital mientras
transporta los objetos requeridos o solicitados. Hay que resaltar también que
el prototipo desarrollado por este autor es bastante robusto a nivel de
software, debido a la capacidad de seguir trayectorias y/o seleccionar la mejor
ruta gracias al mapa precargado que posee en memoria, como se muestra en la
figura 7. Esto facilita al robot conocer a priori los puntos de recolección y
entrega del material a transportar. Cabe mencionar que esto es posible debido
al tipo de software que utiliza, en este caso ROS, al ejecutarse en Linux,
permite un procesamiento más alto de las operaciones internas del robot, en
este caso lectura y procesamiento de mapas y presenta la característica de abstracción
del hardware del robot para así aprovechar de manera más óptima los sensores y
actuadores instalados en él.
Particularmente para el robot desarrollado por
este autor, para recorrer los mapas precargados adecuadamente, se necesita
hacer uso de un IMU (por sus siglas en inglés: Inertial Measurement Unit)
(Barnea 2011) [35], para la
navegación y localización de un sistema robótico autónomo, ayudando así a
conocer la posición, orientación y desplazamiento del robot dentro del mapa.
Por otra parte, este entorno de software, permite realizar simulaciones del
robot facilitando de esta manera el desarrollo del prototipo y acelera los
tiempos de prueba debido a que se puede realizar un análisis a priori antes de
la implementación en sitio. De igual manera, en la sección 3.1.4 se abordará
más a fondo este tema.
Por otra parte, existe otro modelo de negocio
público que también se puede beneficiar con este tipo de tecnología. Este es el
caso de las bibliotecas. Para este tipo de lugares es interesante debido a que
se pueden evidenciar diariamente diversos procesos, como la ubicación y
recolección de libros, el cual usualmente es realizado por personas. De acuerdo
a lo anterior, (Sepúlveda 2014) [36] propone un modelo de AGV el cual
radica en el beneficio de explotar la funcionalidad de un robot en trabajos que
son pesados y repetitivos. Dicho vehículo automatiza el proceso de
caracterización, categorización, referenciación y ubicación de libros en un
ambiente con condiciones controladas. Aunque, la infraestructura donde se
implemente el vehículo debe igualmente estarlo por ejemplo con un sistema de
almacenamiento automático de libros, cada uno referenciado por un identificador
que reconoce la memoria del robot (Sepúlveda 2014) [36].
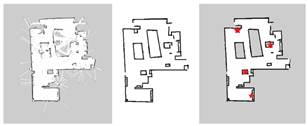
Figura 6. Mapa del
laboratorio del autor (Acosta 2015) [34].
Finalmente,
el área de aplicación donde actualmente se usan con mayor frecuencia los AGV’s
son en el sector industrial. De acuerdo a un estudio realizado por (Sabattini 2017) [37], en las
plantas de fabricación modernas, la automatización es ampliamente adoptada en
las fases de producción, lo que conduce a un alto nivel de productividad y
eficiencia. Sin embargo, generalmente no se logra el mismo nivel de
automatización en logística, ya que es realizado por operadores humanos y
vehículos de accionamiento manual. De hecho, aunque los AGV se han utilizado
durante algunas décadas para el transporte de mercancías en entornos
industriales (Gunter 2015) [15], todavía no representan una solución
generalizada y se aplican solo en escenarios específicos. Un ejemplo es el
sistema Kiva (Wurman 2008) [38], donde los AGV son utilizados como estantes de
almacenamiento móviles que pueden ser levantados por pequeños robots autónomos.
Al llevar el producto al trabajador, la productividad se incrementa en un
factor de dos o más, a la vez que mejora otros aspectos. Si bien esta solución
es muy efectiva para este tipo de aplicaciones, vale la pena señalar que no se
puede aplicar directamente a la manipulación de materiales en fábricas
genéricas. Lo que hace que este sistema sea único es que los AGV se mueven en
un entorno restringido, donde otras entidades no están permitidas (Sabattini 2017) [37], (Wurman 2008)
[38]. Esto hace que el sistema
no sea aplicable a entornos mixtos compartidos por operadores humanos,
vehículos de accionamiento manual y AGV’s.

Figura 7. AGV durante la
navegación en diferentes escenarios para la construcción de mapas (Acosta 2015)
[34]
3.1.3
Algunos de métodos de control del AGV en recintos cerrados.
Existen diversas técnicas de control que ayudan
a los AGV a cumplir con las tareas programadas dentro de una planta de
producción o cualquier otro espacio en donde se soliciten. Muchas de estas
técnicas son aplicadas de acuerdo a la especificidad del proyecto o la
necesidad de resolver una situación con una técnica específica. Este es el caso
de (Silvirianti 2017) [12] el
cual busca la estabilidad del movimiento de un AGV debido a que este afecta
directamente la seguridad de los productos entregados. Este autor argumenta que
la variación de la carga durante el proceso de entrega es una de las causas del
movimiento de inestabilidad de los vehículos. Por tal motivo, implementa un
control de velocidad sin importar la variación de la carga utilizando un
sistema de inferencia difusa integrado con el método PID. La entrada del
sistema proviene de los sensores de velocidad e inclinación cerca de las ruedas
del AGV. Esta información es luego procesada por el sistema de inferencia
difusa, cuyo resultado son datos sobre la velocidad del AGV y los valores de
los parámetros para el controlador PID. Adicionalmente utiliza sensores de
ultrasonido para evasión de los obstáculos, encoders en las ruedas que
retroalimentan hacia el sistema de control y RFID para la navegación del
vehículo en sitio. En definitiva, (Silvirianti 2017) [12] logra una
velocidad constante de 10 m/min independiente de la variación de la carga en el
AGV.
Otros controles están propuestos en (Parikh 2018)
[40], donde se propone una
comparación entre técnicas de control para un AGV que se traslada a velocidad
constante, logrando esto con la implementación de un controlador difuso y un
controlador PID, realizando la realimentación por medio de encoders adaptados a
las ruedas del vehículo. Adicionalmente, utiliza los algoritmos de
Ziegler-Nichols para sintonizar el controlador PID y las técnicas de Mamdani
para el controlador difuso. Posteriormente, para probar todo el modelo de la
planta y del control, utiliza Matlab/Simulink y las librerías de lógica difusa,
llevando la información recolectada a un arduino quien es realimentado con las
señales del encoder y del control de velocidad de los motores. Finalmente,
(Parikh 2018) [40] concluye que el error en estado estable, el sobre impulso y
el tiempo de subida del sistema, en el controlador PID son mayores que para el
controlador de lógica difusa, brindando este último más estabilidad y precisión
al sistema.
Una forma interesante de utilizar la lógica
difusa es en la alineación o formación de vehículos autónomos, donde un grupo
de móviles siguen a un líder. Se presenta entonces un sistema de control
de formación de robots, en este caso AGV’s, basados en visión, el cual utilizan
un controlador de lógica difusa y un filtro de Kalman extendido (Rusdinar
2012) [41].
Según (Rusdinar
2012) [41], estos
sistemas presentan problemas que afectan los controles de formación con el
controlador de lógica difusa y los robots basados en visión, los
cuales son: la selección de la función de pertenencia para obtener el control
de sistema difuso óptimo y el ruido proveniente del procesamiento de la cámara,
los cuales cambian la posición de la vista de referencia. Para manejar este
tipo de situaciones, (Rusdinar 2012) [41] propone un controlador
difuso equipado con una función dinámica de membresía de salida que controla la
velocidad de las ruedas del robot para manejar la posición de
mantenimiento en la formación. La función de membresía de salida cambia con el
tiempo en función de los cambios en las entradas. Por otra parte, los ruidos
que aparecen en el procesamiento de la imagen cambian las posiciones del punto
objetivo virtual que maneja el filtro de Kalman extendido por lo cual las
posiciones del objetivo virtual se establecen para definir las formaciones.
Adicionalmente, las posiciones del punto objetivo virtual se pueden cambiar en
cualquier momento de acuerdo con la formación deseada. Finalmente, estos
algoritmos han sido validados a través de la simulación, confirmando que los
robots seguidores alcanzan su punto objetivo en poco tiempo y pueden mantener
su posición en la formación, aunque el ruido cambia las posiciones del punto
objetivo (Rusdinar
2012)
[41].
Es importante reconocer entonces que con
algunas herramientas informáticas se hace más sencillo y efectivo determinar
los parámetros óptimos de un control PID, un controlador difuso o uno PID
difuso. En la actualidad, se implementan cada vez más aplicaciones para los
controladores PID difusos que tienen una configuración mucho más flexible que
sus análogos lineales. Los métodos para determinar los parámetros óptimos de
los controladores PID difusos son bastante complejos y consumen mucho tiempo,
lo que restringe significativamente su aplicación (Kudinov 2017) [42]. Debido a
esto, (Kudinov 2017) [42] propone un método simple de controladores,
particularmente el PID difuso, con el uso de Matlab, adicionándoles ciertas
disposiciones del método de linealización difusa, dividiendo a su vez este
procedimiento en tres pasos: Identificación del controlador difuso, estimación
de los coeficientes del controlador difuso y finalmente, construcción de un
sistema de control digital.
Cuando las aplicaciones desarrolladas para el
AGV son a altas velocidades, se presentan problemas de fuerzas de fricción,
vibraciones y deslizamiento entre las ruedas y el terreno (Ahmed 2015) [43]. En
este orden de ideas, (Ahmed 2015) [43] hace referencia a los problemas de seguimiento
de trayectos, los cuales en la mayoría de ocasiones son inciertos, y crean cierta
borrosidad en la entrega de información al sistema. Es por esto que, como los
modelos determinísticos no son suficientes, dicho autor propone un controlador
PID neuronal difuso para compensar la fricción y los efectos de perturbaciones
externas durante el seguimiento de trayectorias de un robot móvil no holonómico,
en donde los parámetros del control adaptativo se actualizan de acuerdo con un
algoritmo de aprendizaje en línea.
Una forma para desarrollar la inteligencia de
los AGV para el seguimiento de trayectos en complejos industriales o edificios
y con autorización para ingresar a lugares restringidos, es a través del
seguimiento de líneas usando sensores de color y RFID para la navegación en el
medio, como se propone en (Nugraha 2015) [44], donde se plantea un
robot seguidor de línea diseñado para detectar diferentes colores de línea
representadas en diferentes rutas. Este sistema utiliza un microcontrolador que
implementa lógica difusa, particularmente el método de inferencia de Mamdani.
Adicionalmente para detectar la línea, el vehículo está equipado con un sensor
de color y un sistema de identificación y autorización basado en RFID. Cabe
aclarar que a pesar que las rutas están trazadas en el suelo facilitando el
recorrido de trayectos realizados por el robot, para cambios de colores muy
oscuros en la superficie del suelo, el sistema necesita ser adaptado para así
reconocer estos cambios, evitando que el vehículo se pierda en el trayecto (Nugraha
2015) [44]. Es importante mencionar que al implementar este tipo de tecnología
en los AGV se está contribuyendo para que el robot tenga la capacidad de
compartir información con otras máquinas y con bases de datos en la nube,
haciendo posible capturar los datos en tiempo real para la logística automática
en una fábrica inteligente, lo que lo hace importante en la industria 4.0 (Zou
2018) [45]. Según este autor, utilizando esta tecnología se puede lograr
obtener un mapa virtual de la planta, o por lo menos de los puntos más
importantes y de interés para el usuario final, debido a que brinda la
capacidad para ayudar en la toma de decisiones, y esto se facilita debido a que
al integrar estas etiquetas en las rutas ayudan a identificar la ubicación para
lograr la logística automática, como se muestra en la figura 8.
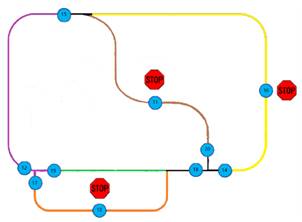
Figura 8. Diseño de rutas
con etiquetas RFID, estaciones de paros y en color se muestran las trayectorias
a recorrer (Zou 2018) [45]
Basado
en el modelo cinemático, (Bui 2013) [46] presenta un controlador de seguimiento
para un AGV, que rastrea una trayectoria de referencia, usando el sensor laser
NAV200. Inicialmente el AGV se mueve manualmente para rastrear la trayectoria
de referencia. A partir de ese momento, las coordenadas obtenidas del sensor
laser de la posición del AGV son almacenadas en memoria. Luego estos datos se
utilizan para ayudar al AGV a trasladarse repetidamente por esta trayectoria en
el futuro. Para el diseño del controlador se usó la técnica no lineal de
Lyapunov, verificando así la estabilidad y a su vez, proporcionando robustez
para las perturbaciones generadas por la carga y el ruido de los sensores, de
manera que pueda seguir de forma eficaz la trayectoria. El vehículo consta de
un sensor láser NAV200 para detectar la posición del AGV en tiempo real, un
controlador basado en una computadora industrial (figura 9), adicionalmente 4
ruedas, dos de ellas pasivas y dos motrices (figura 10). La eficacia del
controlador propuesto se prueba mediante simulación y resultados experimentales
(Bui 2013) [46].
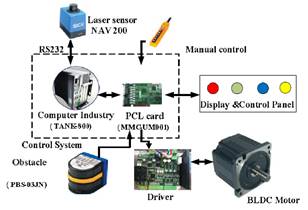
Figura 9. Esquema del sistema de
control para el AGV propuesto por (Bui 2013) [46].
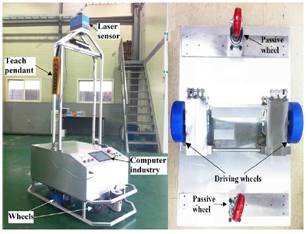
Figura 10. Prototipo de un AGV
experimental (Bui 2013) [46]
Por
otro lado, (Carlucho 2017) [47] plantea mejoras en las técnicas de control
clásico para perfeccionar las respuestas de los sistemas. Dicho autor ha estado
desarrollando sistemas expertos e inteligentes para controlar muchos sistemas
tecnológicos, incluidos los robots móviles. Por otra parte, el controlador PID
es una estrategia de control ampliamente usada en muchas tareas de ingeniería
de control, contribuyendo con diferentes métodos de ajuste para obtener las
ganancias en condiciones de operación específicas, pero en ocasiones, los
sistemas no se conocen completamente y las condiciones operativas son variables
y desconocidas previamente, en donde las técnicas clásicas no son del todo
adecuadas para la sintonización de un PID (Carlucho 2017) [47]. De lo anterior,
(Carlucho 2017) [47] propone una estrategia incremental de Q-learning para el
control PID adaptativo para mejorar la eficiencia del aprendizaje, definiendo
una memoria temporal en el proceso. Si bien la memoria permanece invariable, se
lleva a cabo un proceso de especialización no uniforme que genera nuevos
sub-espacios de aprendizaje limitados, implementando entonces un robot móvil el
cual demuestra la aplicabilidad del enfoque propuesto para un ajuste simultáneo
en tiempo real de múltiples controladores PID adaptativos para un sistema que
opera bajo condiciones variables en un entorno. Sin embargo, el comportamiento
de los sistemas de dirección de deslizamiento, como en algunos robots móviles,
es complejo para modelar matemáticamente porque la maniobra de giro se realiza
deslizando sobre el suelo donde la cantidad de derrape varía con el terreno. La
velocidad y la dirección de los sistemas de dirección deslizante dependen mucho
entre sí. Cualquier intento de maniobrar el vehículo afecta su velocidad y
viceversa. La diferencia de velocidad y/o dirección de rotación en ambos lados
hace que el vehículo gire y que se produzca un deslizamiento en esta maniobra (Carlucho
2017) [47].
3.1.4
Sistema software para la programación de vehículos de guiado autónomo.
Actualmente
existen diferentes lenguajes de programación, y metodologías para programar
robots, en este caso en particular AGV’s, que suelen ser sistemas complejos
que demandan cierto grado de conocimiento en varios campos de la ingeniería
debido a que son sistemas que integran diversos componentes de hardware, tanto
mecánicos, eléctricos y electrónicos, convergiendo en un equipo que se debe
desempeñar satisfactoriamente en un área o lugar de trabajo específico. Para
lograr dicho objetivo, se han desarrollado diferentes componentes de software
que coordinan todos estos mecanismos físicos. (Hellmund 2016) [48]
hace una comparación entre tres sistemas de software para la programación de
vehículos autónomos.
El
primero de estos sistemas es el KogMo-RTDB (Por sus siglas en inglés: Real-time
Database for Cognitive Automobiles), el cual es una arquitectura
centralizada que proporciona una asignación de memoria dinámica para objetos de
datos, y a su vez la memoria debe asignarse estáticamente dentro de los objetos
(Hellmund
2016)
[48]. Adicionalmente, este entorno de software posee herramientas para grabar y
reproducir objetos de datos. Sin embargo, la manera como es gestionada la
memoria puede convertirse en una situación engorrosa en escenarios donde el
tamaño de los objetos varía, por ejemplo, en los datos adquiridos por un láser.
Otro
sistema software utilizado para los vehículos autónomos es el ADTF (por sus
siglas en inglés: Automotive Data and Time-Triggered Framework), cuyo
entorno de pruebas y desarrollo es el más utilizado en la actualidad para los
sistemas avanzados de asistencia al conductor (ADAS) (Messner 2015) [49], (Hoffmeister 2016) [50]. Este
entorno de software está diseñado como un sistema en tiempo real con cadenas de
procesos distribuidas y admite el procesamiento de datos síncrono y asíncrono.
Por otra parte, es una herramienta extensible mediante módulos personalizados y
permite la integración de toolbox en Matlab/Simulink. Hay que tener en cuenta
que ADTF es un producto licenciado, razón por la cual es utilizado
principalmente en empresas industriales.
Finalmente,
se hará una descripción más detallada de ROS (por sus siglas en inglés: Robot
Operating System) debido a la robustez, versatilidad e impacto a nivel
global (Garber 2013) [23]. ROS es un software de código abierto que permite el
diseño de sistemas complejos pero modulares en un entorno informático
distribuido. A pesar que ROS significa Sistema Operativo Robótico, realmente no
es un sistema operativo en el sentido tradicional de la gestión y programación
de procesos; más bien, proporciona una capa de comunicaciones estructurada capaz
de abstraer información de diferente hardware por encima del sistema operativo
host, como se muestra en la figura 11 (Quigley 2009) [51].
Si
bien los componentes de ROS son altamente genéricos, el enfoque principal de
ROS y su ecosistema se centra en el desarrollo e investigación de robots. Las
partes críticas del desempeño están hechas en C++, pero las aplicaciones que
operan en una capa superior o de alto nivel pueden ser escritas en C++, Python,
Octave y LISP [52]. Algunos conceptos fundamentales que se deben conocer cuando
se realiza cualquier implementación de ROS, son los nodos, mensajes, tópicos,
servicios y acciones. De acuerdo con (Quigley 2009) [51], los nodos son
procesos que realizan cálculos y se ejecutan dentro de la aplicación del robot.
En este contexto, un sistema está compuesto generalmente por muchos nodos.
Un
nodo ROS se asigna a un solo proceso del sistema operativo, mientras que los
nodelets de ROS residen como hilos dentro de un proceso único llamado ROS
Nodelet Manager. La comunicación entre los nódulos se acelera mediante las
comunicaciones intra-ROS como lo indica el enlace entre las capas ROS de la
figura 11. La comunicación entre procesos, por ej. A través de los nodos, se
transmite por medio de las capas de red del sistema operativo (Hellmund
2016) [48].
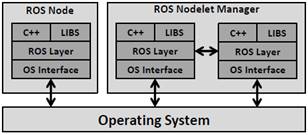
Figura 11. Arquitectura de
aplicaciones ROS.
En
ese orden de ideas, los nodos se comunican entre sí intercambiando mensajes. Un
mensaje es una estructura de datos escrita. Se admiten el tipo primitivo
(entero, booleano, punto flotante, etc), al igual que las matrices o
estructuras de tipos primitivos y constantes. Una característica de los
mensajes es que pueden estar compuestos por otros mensajes y anidados de forma
arbitraria. Cuando se transmite un mensaje, este es ruteado vía un sistema de
transporte con semántica de publicador/subscriptor y esto se realiza por medio
de los tópicos. Los tópicos interconectan los nodos y básicamente cuando un
nodo está interesado en cierto tipo de dato, se subscribirá al tópico apropiado
y a su vez, este tópico publicará en el o los nodos subscritos a él. En
general, los editores y subscriptores no conocen la existencia de los demás. También
se debe tener en cuenta que la arquitectura del sistema actual no está capacitada
para trabajar en tiempo real debido a la falta de garantías para la ejecución
de los nodos y transmisión de prioridad de los mensajes. En otras palabras, ROS
no es un sistema operativo en tiempo real, pero permite integrar ROS con el
código en tiempo real (Aini 2017) [53]
Finalmente,
los servicios y las acciones permiten codificar una funcionalidad específica
para el robot. Su principal diferencia es que cuando se llama un servicio, el
robot tiene que esperar hasta que este haya terminado antes de hacer otra cosa.
Por otra parte, cuando se llama una acción, el robot puede seguir haciendo otra
actividad mientras ejecuta dicha acción.
En
conclusión, los tres sistemas software presentados muestran ventajas y desventajas
los cuales se deben evaluar antes de comenzar a diseñar cualquier robot. En
términos generales, estos resultados se pueden resumir en la tabla 1, en donde
se califica de excelente (++), muy bueno (+), bueno (O), poca disponibilidad
(-) y casi no disponible (--):
|
Requerimiento
|
ROS
|
RTBD
|
ADFT
|
|
Modularidad
|
++
|
++
|
++
|
|
Extensibilidad
|
++
|
+
|
+
|
|
Tiempo - Real
|
-
|
+
|
++
|
|
Simulación
|
++
|
O
|
O
|
|
Depuración
|
++
|
+
|
++
|
|
Tolerancia a fallos
|
O
|
-
|
+
|
|
Seguridad
|
-
|
-
|
O
|
|
Usabilidad
|
++
|
O
|
+
|
|
Soporte
|
++
|
--
|
+
|
Tabla 1. Comparación
de sistemas software para robots móviles de acuerdo a (Hellmund 2016) [48].
De
acuerdo a la tabla 1, un aspecto interesante que se visualiza para estos tres sistemas
software, es la posibilidad de realizar simulaciones de los prototipos que se
quiera implementar en algún tipo de planta. Particularmente, ROS presenta
herramientas muy poderosas de simulación que tienen como una de sus principales
características, el permitir trabajar con modelos bajo leyes físicas, lo que
garantiza que el robot o proceso simulado presente una alta confiabilidad al
momento de implementarlo en el mundo real (figura 12) [52]. Un ejemplo de lo
mencionado anteriormente, es el presentado por (Cavanin 2018) [54], quien
propone un estudio preliminar sobre la localización de un vehículo autónomo en
un entorno industrial, en donde primeramente virtualizó el AGV utilizando ROS,
por medio de las herramientas RVIZ y GAZEBO, además de una red de sensores con COOJA,
el cual es un simulador de red diseñado específicamente para redes de sensores
inalámbricos [55]. Este autor
al integrar estos dos sistemas envía al vehículo los datos sobre las
intensidades de señal proporcionado por los nodos de la red y seguidamente exporta
estos datos en un algoritmo de fusión de sensores como ayudas de medición para
la estimación odométrica (Cavanini 2018) [54]. En
términos generales, estos dos simuladores se pueden usar para ejecutar algoritmos
de seguimiento de rutas y probarlos en un escenario virtual antes de la
implementación real.
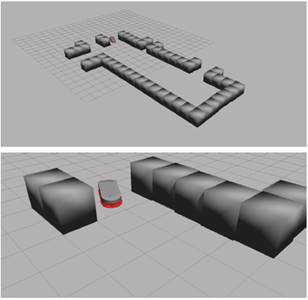
Figura 12. AGV en un ambiente
simulado vía Gazebo (Cavanini 2018) [54]
Continuando
con GAZEBO como herramienta de simulación de modelos robóticos, (Walenta 2017)
[22] propone una
solución para la auto-localización, control del comportamiento, enrutamiento
libre de conflictos y control de movimiento de una red de AGVs basado en ROS (Walenta
2017)
[22]. Esta
solución muestra una arquitectura de sistemas para un control descentralizado
de múltiples vehículos guiados automatizados que realizan tareas de transporte
de materiales en aplicaciones intralogísticas basada en una solución de
robótica móvil. Adicionalmente este autor presenta a los vehículos autónomos
capaces de ubicarse en un entorno conocido encontrando el camino a través de un
gráfico topológico bidireccional discreto, permitiendo dar solución a
implicaciones de problemas de planificación global, limita el rango operativo
del vehículo, acelera el tiempo de implementación, reduce la complejidad del
gráfico topológico y permite una adaptación dinámica a los cambios ambientales,
realizando una gestión de tráfico predictiva basada en la comunicación entre
los vehículos tratando de maximizar el flujo del material. Un resultado interesante
que se puede destacar a partir de lo mostrado en la simulación con GAZEBO es
que sugiere mejorar la repetitividad de la posición debido a que en algunos
casos presenta una desviación alta con la posición programada. Sin embargo,
esto se puede mitigar adicionando más sensores que ayuden al vehículo a ser más
preciso en dicha variable.
Precisamente,
una posible solución al tema de la posición de un robot en un recinto cerrado
usando ROS es la presentada por (Abhishek 2017) [56], el cual
diseña un vehículo autónomo que es capaz de mantener una velocidad constante y
un monitoreo o vigilancia de la distancia recorrida (Abhishek 2017) [56]. Este
autor implementa ROS para realizar rastreo y telemetría de la trayectoria,
implementando técnicas de procesamiento de imágenes para la navegación y
detección de obstáculos. Adicionalmente, implementa redes neuronales para
detectar el camino más corto usando la adquisición de imágenes y diferentes controladores
PI y PID para el movimiento y la evasión de obstáculos. Todas estas técnicas de
control clásico, control inteligente, procesamiento de imágenes, entre otras
herramientas utilizadas por ROS ayudan a que el robot perciba el entorno por
donde está transitando, el cual de entrada ya es una tarea compleja debido a la
gran cantidad de datos que se recolectan, donde muchos pueden ser relevantes o
no serlo. Por otro lado, ROS también ayuda al AGV a auto-localizarse en un
espacio determinado en donde debe estar preparado para dar un diagnóstico de su
estado, incluso si uno de sus sensores se encuentra averiado.
De
acuerdo a lo anterior, es importante destacar que construir un robot para que
realice todas las tareas programadas de manera automática, es una tarea
significativa. Sin embargo, cuando un investigador se concentra tanto en la
construcción del robot, como en la del software, el tiempo invertido en ambas
actividades se puede convertir, tanto para el desarrollo e implementación del
AGV, en una labor muy dispendiosa. Debido a esto, autores como (Rhoades 2017)
[57] proponen que el investigador se debe concentrar más en el diseño y
desarrollo de software que en la misma plataforma robótica. Y esto se facilita
ya que la robótica viene experimentando un cambio de paradigma a medida que los
robots han cambiado de estar fijos en el piso de fábrica a plataformas basadas
en dispositivos móviles (Rhoades 2017) [57]. El
objetivo de estas nuevas bases y estructuras de robots es garantizar que la
progresión en la investigación no se vea obstaculizada por la carga de
abstracciones inferiores, como la configuración sensorial o los mecanismos de
accionamiento y la mecánica, sino que le permita al investigador centrarse en
la complejidad de la ejecución de algoritmos de niveles superiores 52, Rhoades
(2017) [57].
Y es aquí donde ROS juega un papel muy importante, ya que se convierte en el “middleware” o puente entre hardware y los algoritmos de
alto nivel (software). Un ejemplo de lo anterior es el robot móvil Turtlebot [58],
el cual ha impulsado el desarrollo de otras plataformas robóticas
especializadas que contienen varios motores, sensores y disposiciones de
bastidores de dirección. En general, la diversidad de estas plataformas permite
la prueba de varios vehículos autónomos, técnicas de detección y despliegue
rápido en el proceso [59].
Un
ejemplo de implementación de un proyecto que usa un robot móvil comercial (ya
construido) en donde se hace énfasis en el desarrollo del software es el
mencionado por (Schueftan 2015) [60]. Este autor presenta una arquitectura
de localización y mapeo simultaneo (SLAM) aplicada a la navegación autónoma de
un AGV, en este caso en particular un robot KUKA youBot, dentro de un sistema
de manufactura flexible (FMS). En la figura 13 se puede observar el esquema
propuesto.

Figura 13. Esquema de arquitectura
de control propuesta por (Schueftan 2015) [60]
(Schueftan 2015)
[60] expone que
uno de los factores claves para integrar una AGV en un FMS está relacionado con
las tareas de selección y colocación, donde el AGV es capaz de recoger y
entregar objetos en un proceso industrial o logístico determinado. Si se quiere
realizar dicha tarea con el vehículo, primero es necesario que reconozca el
entorno y luego navegar a través de él autónomamente. De acuerdo a lo anterior,
dicho autor utiliza SLAM para dar solución a este problema. Muchos de los
algoritmos SLAM citados en la literatura se basan en técnicas probabilísticas
utilizando el teorema de Bayes, entre los más usados se puede encontrar el
filtro de Kalman (EKF) y por otra parte el filtro de partículas o la estimación
de Monte Carlo (Jaulin 2011) [61]. Particularmente este último es una variante
de la localización de Markov que se apoya en la representación basada en muestras
y resuelve dichos problemas en la localizacion global, en donde esta surge
cuando el robot no conoce la posición de inicio y necesita conocer la posición
real desde el principio (Aini 2017) [53]
ROS
incluye el algoritmo de localización de Monte Carlo, el cual muestra en primera
instancia una posición inicial del robot, y luego hace el mapeo para elaborar y
precargar el mapa en el robot, el cual es necesario para su localización.
Después
de este procedimiento, el robot publica el mapa y este se subscribe a Augmented
Monte Carlo Localization (AMCL). Si se completa el mapeo, el robot mide los
datos del escaneo laser y los datos de odometría y luego los compara en un
editor de mapas. Finalmente, los datos del proceso AMCL y el resultado de la
comparación son datos de una matriz.
En
resumen, hay tres pasos principales para realizar SLAM: percepción, mapeo y
navegación. Es en este punto donde ROS toma gran relevancia ya que, usando este
software se saca provecho de la sensórica ofrecida por el KUKA youBot, en donde
se aplicaron técnicas de fusión de sensores, combinando la información
proporcionada por el láser con la odometría del AGV para obtener el espacio
escaneado del entorno (Schueftan 2015) [60].
4. ANÁLISIS Y
DISCUSIÓN
De
acuerdo al material revisado se pudo evidenciar la dificultad a la que se
enfrentan las organizaciones en el sector comercial, industrial, hospitalario, educativo,
entre otros, para la manipulación y transporte de los materiales desde un lugar
a otro o incluso de una máquina a otra, teniendo en cuenta que la materia prima
puede presentar tamaños y formas irregulares, además de los espacios reducidos o
de difícil acceso en donde un usuario debe transitar para transportar los
productos a diferentes lugares del sitio de trabajo (Drira 2007) [24].
En
la industria frecuentemente surge la necesidad de automatizar o proporcionar
una solución para el manejo y transporte de materiales. Dependiendo del tipo de
material que se manipule, existen diferentes soluciones en el mercado. Por
ejemplo, se pueden encontrar transportadores de banda o rodillos, elevadores,
robots para la manipulación de materiales y vehículos guiados autónomos (Martinez 2010) [62]. Este es el
caso del transporte de material de forma horizontal, donde los transportadores
de bandas o rodillos motorizados son una posible solución. Sin embargo,
presentan la desventaja de ser fijos en el lugar instalado y difícilmente se
puede variar el diseño en el tiempo, porque desde su esquema inicial se concibe
para un lugar y un trabajo específico. Para sitios donde los espacios son
reducidos y es necesario aprovechar cada centímetro del lugar de operación para
ubicación de maquinaria y puestos de trabajo, o se tiene el riesgo de que los
usuarios corran con algún daño físico, se hace necesario el uso de vehículos
guiados autónomos, los cuales se ajustan fácilmente para realizar dichas
tareas (Ahmed 2015) [43].
Este tipo de tecnología se ha convertido en
pieza fundamental en algunas industrias o procesos, tales como centros
logísticos en donde se manipulan productos de grandes tamaños y cantidades (Sabattini
2017) [37], y en sistema de transportes urbanos (Osman 2017) [32]. En
cada uno, respectivamente, se usan diferentes técnicas para implementar estos
vehículos de acuerdo al entorno donde se vayan a desempeñar.
Particularmente en la industria, la
manipulación y el transporte de la materia prima de un lugar a otro se ha convertido
en factores críticos dentro del flujo productivo, impactando notablemente en el
crecimiento industrial y consecuentemente la adquisición de nuevas tecnologías,
para darle respuesta a dicha demanda (Samaranayake 2017) [1], (Paul 2017) [63], con
lo cual se ha despertado el interés investigativo desde diversas aristas que
proponen diferentes alternativas de aplicación de AGV’s en la industria (Martinez 2010) [62].
De
ahí que el enfoque de este estudio se base en los AGV como una solución que ofrece
una forma de llevar materia prima de un sitio a otro, ya que los sistemas
de manufactura flexible (FMS) son organizados en estaciones de trabajo logrando
que los AGV sean clave esencial en este tipo de metodología, en adición a la
flexibilidad y adaptabilidad que manejan gracias a la poca infraestructura que
necesitan (Ribas 2014) [64], lo cual es muy conveniente debido a que
muchas industrias presentan problemas en su disposición interna bien sea por
localidad, falta de diseño al inicio de su conformación, distribución
desordenada de maquinaria, entre otros (Gutta 2018) [25].
Por
otro lado, esto llevará a que los vehículos de guiado autónomo enfrenten
situaciones tales como posiciones indeterminadas en el proceso, condiciones
desfavorables de tráfico, embotellamiento, rutas no disponibles, entre otros (Paul
2006) [65]. Sin embargo, autores como (Vavrík 2017) [66] y como
los otros ya mencionados, proponen una solución de navegación que le permitirá
al vehículo conocer a priori el lugar por donde está transitando y (Riesa 2017)
[12] plantea algunos métodos de control que ayudarán al móvil a mantener
una velocidad y control de la dirección de acuerdo al sitio que se encuentre
recorriendo. De esta manera se tendrá un punto de partida para implementar un
AGV con ciertas características específicas para el transporte de mercancía
junto con el grupo operativo, minimizando tiempos improductivos y asegurando la
integridad del producto transportado.
Finalmente
es importante complementar, en el contexto de la industria 4.0 como los
vehículos de guiado autónomos desafían las tecnologías actuales de comunicación
y localización. Debido a los requisitos de latencia y confiabilidad, algunas de
las soluciones existentes no son capaces de cumplir con el rendimiento
requerido por las aplicaciones de automatización industrial. Es por esto que se
hace necesario tecnologías de comunicación más flexibles que puedan coexistir
en armonía con las diferentes aplicaciones robóticas y contribuyan con un mejor
desempeño de los AGV en aplicaciones industriales, y no por el contrario,
incapaciten y/o generen conflicto con otros sistemas de información. Hay que
resaltar también que existen otro tipo de vehículos no tripulados para el
transporte de materiales y/o mercancía de forma aérea, como lo son los drones,
los cuales en aplicaciones de logística tienen requisitos completamente
diferentes en comparación con los AGV (Fellan 2018) [67]. Por tal motivo, no
son tratados en este documento.
5. CONCLUSIONes
Este
trabajo presenta una revisión de literatura que se concentró en los AGV desde
cuatro puntos de vista (1) identificación y reconocimiento del lugar de trabajo,
(2) desempeño de funcionamiento en diferentes entornos, como por ejemplo en
sitios cerrados y aire libre, (3) control del AGV y finalmente (4) una breve
descripción del papel que juegan los sistemas de software, haciendo énfasis en
ROS, para el desarrollo de los algoritmos que permiten el funcionamiento del vehículo.
Se
presentan los AGV de acuerdo a la solución que ofrecen para el trasporte de
materia prima, mercancía, objetos, entre otros, de acuerdo a la necesidad de
automatizar procesos, mejorar tiempos, flujos de producción y aseguramiento de
la integridad del producto y del recurso humano.
Se
reconoce claramente las oportunidades que ofrece esta tecnología en el área de
la robótica y por eso es necesario seguir profundizando e investigando en
herramientas de software como ROS, que ayuden a potenciar los diferentes
recursos de hardware que componen a un robot logrando así maximizar su
funcionamiento y prestación de un mejor servicio en el sitio de aplicación.
También se evidencia la influencia de los AGV dentro del contexto de la
Industria 4.0, y como juegan un papel importante en el mejoramiento de los
flujos productivos gracias al intercambio de información con los sistemas de
gestión y quienes los administran para la toma de decisiones.
ROS
es un software de código abierto especializado en robótica que se ha venido
transformando en un estándar que facilita la programación y construcción de
algoritmos, gracias a la abstracción que este hace sobre el hardware del robot,
permitiendo focalizar el esfuerzo en el desarrollo del código. Por lo tanto,
esto permite adquirir una plataforma robótica de bajo costo e instalarle
ROS, de manera que se puede aprovechar todas las bondades que este ofrece como
por ejemplo diferente algoritmos de navegación, localización, algoritmos de
inteligencia artificial y todos los paquetes y librerías asociados para
diferentes componentes de hardware, lográndose de esta
manera diseñar, desarrollar e implementar una plataforma robusta y de
bajo costo económico, convirtiéndose en una tecnología asequible para cualquier
tipo de industria.
De acuerdo a la literatura revisada, se observó
que la infraestructura y ubicación de la maquinaria en una planta de producción
influye en diseño de las rutas de los AGV para el transporte de material
de un sitio a otro, por lo que se hace importante la implementación de nuevas
técnicas y tecnologías que proponen un cambio en la construcción de rutas,
pasando de líneas pintadas en el piso o cables enterrados en el suelo, a la
construcción de mapas 2D y 3D, el uso de cámaras con algoritmos de inteligencia
artificial, tecnología RFID, sensores láser, LIDAR, entre otros, permitiendo
construir rutas más flexibles para los AGV sin la necesidad de hacer grandes
intervenciones y cambios en la infraestructura de una planta industrial.
De
igual manera cabe resaltar que se han logrado avances significativos en el
transporte de materiales, sin embargo, es necesario seguir investigando debido
a que diariamente surgen nuevas ideas para minimizar tiempos de transporte de
productos y flujos de proceso, por lo que se hace necesario seguir creciendo a
nivel tecnológico de manera que se pueda satisfacer al usuario final.
6.
Agradecimientos
Se
agradece a la empresa C.I. G & Lingerie S.A.S y a los profesores programa
de la maestría en ingeniería énfasis en gestión de la automatización del
Politécnico Colombiano Jaime Isaza Cadavid
7. Referencias Bibliográficas
1. Samaranayake
P, Ramanathan K, Laosirihongthong T. Implementing industry 4.0 — A
technological readiness perspective. 2017 IEEE Int Conf Ind Eng Eng Manag.
2017:529-533. doi:10.1109/IEEM.2017.8289947
2.
Hill R, Devitt J, Anjum A, Ali M. Towards In-Transit Analytics for
Industry 4 . 0. In: 2017 IEEE International Conference on Internet of Things
(IThings) and IEEE Green Computing and Communications (GreenCom) and IEEE
Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData).
; 2017:810-817. doi:10.1109/iThings-GreenCom-CPSCom-SmartData.2017.124
3.
Vasiljević G, Miklić D, Draganjac I, Kovačić Z,
Lista P. High-accuracy vehicle localization for autonomous warehousing. Robot
Comput Integr Manuf. 2016;42:1-16. doi:10.1016/j.rcim.2016.05.001
4.
Chen B, Qu T, Thurer M, Huang GQ, Li C, Xu S. Warehouse workload control
for production logistic. In: 2017 13th IEEE Conference on Automation Science
and Engineering (CASE). ; 2017:237-242. doi:10.1109/COASE.2017.8256109
5.
Wang HF, Chang CM. Facility layout for an automated guided vehicle
system. Procedia Comput Sci. 2015;55(Itqm):52-61.
doi:10.1016/j.procs.2015.07.007
6.
Bechtsis D, Tsolakis N, Vlachos D, Iakovou E. Sustainable supply chain
management in the digitalisation era: The impact of Automated Guided Vehicles. J
Clean Prod. 2017;142:3970-3984. doi:10.1016/j.jclepro.2016.10.057
7.
Bostelman R, Messina E. Towards Development of an Automated Guided
Vehicle Intelligence Level Performance Standard. In: Autonomous Industrial
Vehicles: From the Laboratory to the Factory Floor. ; 2016:1-22.
doi:10.1520/STP159420150054
8.
Le-Anh T, De Koster MBM. A review of design and control of automated
guided vehicle systems. Eur J Oper Res. 2006;171(1):1-23.
doi:10.1016/j.ejor.2005.01.036
9.
Andreasson H, Bouguerra A, Cirillo M, et al. Autonomous transport
vehicles: Where we are and what is missing. IEEE Robot Autom Mag.
2015;22(1):34-75. doi:10.1109/MRA.2014.2381357
10.
Shakya R, Rajanwal K, Patel S, Maurya RK. Optimization and Designing of
Pid, Fuzzy & Pid-Fuzzy Controller. Int J Sci Eng Res.
2014;5(1):2040-2048.
11.
Zulfatman, Rahmat MF. Application of Self-Tuning Fuzzy Pid Controller on
Industrial Hydraulic Actuator. Nternational J Smart Sens Intell Syst.
2009;2(2):246-261.
12.
S RKA. Speed Control System Design Using Fuzzy-PID For Load Variation of
Automated Guided Vehicle ( AGV ). In: 2017 2nd International Conference on
Frontiers of Sensors Technologies. ; 2017:5-9.
doi:10.1109/ICFST.2017.8210549
13.
Juan Martin Echeverri Estrada PAEM. Caracterización De Un Agv (Vehículo
Guiado Automáticamente) En El Sistema De Manufactura Flexible; Caso Centro
Tecnológico De Automatización Ctai De La Pontificia Universidad Javeriana. 2012.
http://repository.javeriana.edu.co/bitstream/10554/10296/1/EcheverriEstradaJuanMartin2013.pdf.
14.
Vis IFA. Survey of research in the design and control of automated guided
vehicle systems. Eur J Oper Res. 2006;170(3):677-709.
doi:10.1016/j.ejor.2004.09.020
15.
Gunter Ullrich. Automated Guided Vehicle Systems. Springer.
Germany; 2015. doi:10.1016/0166-3615(84)90043-5
16.
Theunissen J. Smart AGV System for Manufacturing Shopfloor in the Context
of Industry 4 . 0. In: 2018 25th International Conference on Mechatronics
and Machine Vision in Practice (M2VIP). IEEE; 2018:1-6.
doi:10.1109/M2VIP.2018.8600887
17.
Chen B. VERIFICATION AND VALIDATION STRATEGIES ON COLLABORATIVE ROBOTIC.
In: 2017 IEEE International Symposium on Product Safety and Compliance
Engineering - Taiwan (ISPCE-TW). IEEE; 2017:1-2. doi:10.1109/ISPCE-TW.2017.8626833
18.
Parys R Van, Verbandt M, Kotz M, et al. Distributed Coordination ,
Transportation & Localisation in Industry 4 . 0. In: 2018 International
Conference on Indoor Positioning and Indoor Navigation (IPIN). ;
2018:24-27. doi:10.1109/IPIN.20188533768
19.
Julián A, Zapata M, Felipe D, Lema G, Castro Ospina AE. Diseño De
Prototipo De Un Vehículo De Guiado Automático.; 2015.
20.
Bacik J, Durovsky F, Biros M, Kyslan K, Perdukova D, Sanjeevikumar P.
Pathfinder – Development of Automated Guided Vehicle for Hospital Logistics. IEEE
Access. 2017;5:1-1. doi:10.1109/ACCESS.2017.2767899
21.
Kumar Das S. Design and Methodology of Automated Guided Vehicle-A Review. IOSR
J Mech Civ Eng. 2016;03(03):29-35. doi:10.9790/1684-15010030329-35
22.
Walenta R, Schellekens T, Ferrein A, Schiffer S. A decentralised system
approach for controlling AGVs with ROS. In: 2017 IEEE AFRICON: Science,
Technology and Innovation for Africa, AFRICON 2017. ; 2017:1436-1441.
doi:10.1109/AFRCON.2017.8095693
23.
Garber L. Robot OS : A New Day for Robot Design. IEEE Journals
Mag. 2013;46(12):16-20. doi:10.1109/MC.2013.434
24.
Drira A, Pierreval H, Hajri-Gabouj S. Facility layout problems: A survey. Annu
Rev Control. 2007;31(2):255-267. doi:10.1016/j.arcontrol.2007.04.001
25.
Reddy Gutta P, Sai Chinthala V, Venkatesh Manchoju R, Charan MVN V,
Purohit R. A Review On Facility Layout Design Of An Automated Guided Vehicle In
Flexible Manufacturing System. Mater Today Proc. 2018;5(2):3981-3986.
doi:10.1016/j.matpr.2017.11.656
26.
Beinschob P, Meyer M, Reinke C, Digani V, Secchi C, Sabattini L.
Semi-automated map creation for fast deployment of AGV fleets in modern
logistics. Rob Auton Syst. 2017;87:281-295.
doi:10.1016/j.robot.2016.10.018
27.
Lu S, Xu C, Zhong RY, Wang L. A RFID-enabled positioning system in
automated guided vehicle for smart factories. J Manuf Syst.
2017;44:179-190. doi:10.1016/j.jmsy.2017.03.009
28.
Saab SS, Nakad ZS. A Standalone RFID Indoor Positioning System Using Passive
Tags. IEEE Trans Ind Electron. 2011;58(5):1961-1970.
doi:10.1109/TIE.2010.2055774
29.
Lu S, Xu C, Zhong RY, Wang L. A passive RFID tag-based locating and
navigating approach for automated guided vehicle. Comput Ind Eng.
2018;(xxxx):0-1. doi:10.1016/j.cie.2017.12.026
30.
Hartmann S. Scheduling of Automated Guided Vehicle in Different Flexible
Manufacturing System Environment. Int J Innov Res Adv Eng.
2014;1(8):262-267.
31.
Kang J, Lee J, Eum H, Hyun CH, Parks M. An application of parameter
extraction for AGV navigation based on computer vision. In: 2013 10th
International Conference on Ubiquitous Robots and Ambient Intelligence, URAI
2013. ; 2013:622-626. doi:10.1109/URAI.2013.6677408
32.
Osman K, Ghommam J, Saad M. Combined road following control and automatic
lane keeping for automated guided vehicles. 2016 14th Int Conf Control Autom
Robot Vision, ICARCV 2016. 2017;2016(November):13-15.
doi:10.1109/ICARCV.2016.7838680
33.
Pedan M, Gregor M, Plinta D. Implementation of Automated Guided Vehicle
System in Healthcare Facility. Procedia Eng. 2017;192:665-670.
doi:10.1016/j.proeng.2017.06.115
34.
Acosta Calderon CA, Mohan ER, Ng BS. Development of a
hospital mobile platform for logistics tasks. Digit Commun Networks.
2015;1(2):102-111. doi:10.1016/j.dcan.2015.03.001
35.
Barnea A, Berrabah SA. IMU ( Inertial Measurement Unit ) Integration for
the Navigation and Positioning of Autonomous Robot Systems. CEAI.
2011;13(2):38-43.
36.
Evany Ricardo Sepúlveda Gómez. Diseño e implementación de un vehículo
guiado autónomo para la ubicación de libros en un ambiente controlado. 2014.
www.springer.com.
37.
Lorenzo Sabattini, Mika Aikio, Patric Beinschob, Elena Cardarelli VD. The
PAN-Robots Project: Advanced Automated Guided Vehicle Systems for Industrial
Logistics. IEEE Robot Autom Mag. 2017;18(March 2018):55-64.
doi:10.1109/MRA.2017.2700325
38.
Wurman PR, D’Andrea R, Mountz M. Coordinating Hundreds of Cooperative,
Autonomous Vehicles in Warehouses. AI Mag. 2008;29(1):9.
doi:10.1609/aimag.v29i1.2082
39.
Valencia-Hernández C. A., Restrepo-Martínez A., Muñoz-Ceballos N. D.,
“Caracterización de marcadores de realidad aumentada para suuso en
robótica,” Revista Politécnica, vol. 13, no. 25, pp. 87-102, 2017. doi:10.33571/rpolitec.v13n25a7
40.
Parikh P, Sheth S, Vasani R, Gohil JK. Implementing Fuzzy Logic Controller
and PID Controller to a DC Encoder Motor - “a case of an Automated Guided
Vehicle.” Procedia Manuf. 2018; 20:219-226.
doi:10.1016/j.promfg.2018.02.032
41.
Rusdinar A, Kim S-S. Modeling of vision based robot formation control
using fuzzy logic controller and extended Kalman filter. Int J Fuzzy Log
Intell Syst. 2012;12(3):238-244. doi:10.5391/IJFIS.2012.12.3.238
42.
Kudinov YI, Kolesnikov VA, Pashchenko FF, Pashchenko AF, Papic L.
Optimization of Fuzzy PID Controller’s Parameters. Procedia Comput Sci.
2017;103(October 2016):618-622. doi:10.1016/j.procs.2017.01.086
43.
Ahmed SA, Petrov MG. Trajectory Control of Mobile Robots using Type-2
Fuzzy-Neural PID Controller. IFAC-PapersOnLine. 2015;48(24):138-143.
doi:10.1016/j.ifacol.2015.12.071
44.
M. B. Nugraha, Rizki Ardianto P. DD. Design and Implementation of RFID
Line-Follower Robot System with Color Detection Capability using Fuzzy Logic.
In: 2015 International Conference on Control, Electronics, Renewable Energy
and Communications (ICCEREC). ; 2015:75-78.
doi:10.1109/ICCEREC.2015.7337058
45.
Zou O, Member RYZ. Automatic Logistics in a Smart Factory using
RFID-enabled AGVs. In: 2018 IEEE/ASME International Conference on Advanced
Intelligent Mechatronics (AIM). IEEE; 2018:822-826.
doi:10.1109/AIM.2018.8452349
46.
Bui TL, Doan PT, Kim HK, Kim SB. Trajectory tracking controller design for
AGV using laser sensor based positioning system. In: 2013 9th Asian Control Conference
(ASCC). ; 2013:1-5. doi:10.1109/ASCC.2013.6606202
47.
Carlucho I, De Paula M, Villar SA, Acosta GG. Incremental Q-learning
strategy for adaptive PID control of mobile robots. Expert Syst Appl.
2017;80:183-199. doi:10.1016/j.eswa.2017.03.002
48.
Hellmund A-M, Wirges S, Tas ÖS, Bandera C, Salscheider NO. Robot Operating
System: A Modular Software Framework for Automated Driving. In: Proc. IEEE
International Conference on Intelligent Transportation Systems (ITSC). ;
2016:1564-1570. doi:10.1109/ITSC.2016.7795766
49.
Messner J. EB Assist ADTF Automotive Data and Time Triggered Framework.;
2015.
50.
K. Hoffmeister. Automated Driving - Necessary Infrastructure Shift. ATZ
Electron. 2016;1:42-47. doi:https://doi.org/10.1007/s38314-016-0012-z
51.
Quigley M, Conley K, Gerkey B, et al. ROS: an open-source Robot Operating
System. Icra. 2009;3(Figure 1):5.
http://pub1.willowgarage.com/~konolige/cs225B/docs/quigley-icra2009-ros.pdf.
52.
Robot Operating System (ROS). http://www.ros.org/. Accessed October 8, 2018.
53.
Aini FRQ, Jati AN, Sunarya U. A study of Monte Carlo localization on robot
operating system. In: 2016 International Conference on Information
Technology Systems and Innovation, ICITSI 2016 - Proceedings. ; 2017:1-6.
doi:10.1109/ICITSI.2016.7858235
54.
Cavanini L, Cicconi P, Freddi A, et al. A Preliminary Study of
a Cyber Physical System for Industry 4.0: Modelling and Co-Simulation of an AGV
for Smart Factories. In: 2018 Workshop on Metrology for Industry 4.0 and IoT.
IEEE; 2018:169-174. doi:10.1109/METROI4.2018.8428334
55.
COOJA Simulator. http://www.contiki-os.org/start.html. Accessed October
10, 2018.
56.
Abhishek B, Varun Rufus Raj Samuel D, U.V. Vignesh, Gautham S, Keshav k
SRN. ROS based Stereo Vision System for Autonomous Vehicle. In: IEEE
International Conference on Power, Control, Signals and Instrumentation
Engineering (ICPCSI-2017). ; 2017:2269-2273.
doi:10.1109/ICPCSI.2017.8392121
57.
Rhoades BB, Sabo JP, Conrad JM. Enabling a National Instruments DaNI 2.0
robotic development platform for the Robot Operating System. In: Conference
Proceedings - IEEE SOUTHEASTCON. ; 2017:1-5. doi:10.1109/SECON.2017.7925293
58.
TurtleBot.
http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/. Accessed
October 15, 2018.
59.
Robotnik-Portafolio. https://www.robotnik.es/logistics/portfolio/.
Accessed October 15, 2018.
60.
Schueftan DS, Colorado MJ, Bernal IFM. Indoor mapping using SLAM for
applications in Flexible Manufacturing Systems. In: 2015 IEEE 2nd Colombian
Conference on Automatic Control, CCAC 2015 - Conference Proceedings. ;
2015:5-10. doi:10.1109/CCAC.2015.7345226
61.
Jaulin L. Range-only SLAM with occupancy maps: A set-membership approach. IEEE
Trans Robot. 2011;27(5):1004-1010. doi:10.1109/TRO.2011.2147110
62.
Martinez‐Barbera H,
Herrero‐Perez D.
Development of a flexible AGV for flexible manufacturing systems. Ind Robot
An Int J. 2010;37(5):459-468. doi:10.1108/01439911011063281
63.
Paul PV, Saraswathi R. The Internet of Things – A Comprehensive Survey.
In: 2017 International Conference on Computation of Power, Energy,
Information and Communication (ICCPEIC). ; 2017:421-426.
64.
Ribas-Xirgo L. A Virtual Laboratory of a Manufacturing Plant operated with
mobile robots. In: Proceedings of the 2014 IEEE Emerging Technology and
Factory Automation (ETFA). ; 2014:1-4. doi:10.1109/ETFA.2014.7005279
65.
Paul G, Liu DK. Replanning of Multiple Autonomous Vehicles in Material
Handling. Proc IEEE Int Conf Robot Autom Mechatronics, RAM.
2006:231-236. doi:10.1109/RAMECH.2006.252729
66.
Vavrík V, Gregor M, Grznár P. Computer Simulation as a Tool for the
Optimization of Logistics Using Automated Guided Vehicles. Procedia Eng.
2017;192:923-928. doi:10.1016/j.proeng.2017.06.159
67.
Fellan A, Schellenberger C, Zimmermann M, Schotten HD. Enabling
Communication Technologies for Automated Unmanned Vehicles in Industry 4 . 0.
In: 2018 International Conference on Information and Communication
Technology Convergence (ICTC). IEEE; 2018:171-176.
doi:10.1109/ICTC.2018.8539695