1. INTRODUCCIÓN
La acuicultura ha tenido un desarrollo importante a nivel mundial, con un crecimiento promedio anual del 8%, lo que ha implicado que las producciones intensivas generen situaciones estresantes en los animales, trayendo consigo enfermedades, deterioro ambiental y con ello pérdidas económicas. Sin embargo la acuicultura se ha convertido en un suministro importante de alimentos de alto valor nutricional, además de empleos en países desarrollados y en vías de desarrollo [1].
El positivo desarrollo de la acuicultura en Colombia, a nivel de costa e interior del país de forma continua, se debe a la geografía y clima del territorio, dado que los ecosistemas han permitido adelantar el cultivo de especies hidrobiológicas, como camarón, tilapia, trucha, carpa y especies nativas como el bocachico cachama incluyendo etapas como: Producción de alevines, las actividades de levante y engorde, procesamiento o transformación de la producción acuícola y la comercialización [2]. El crecimiento de la Acuicultura en el país es equiparable al del crecimiento mundial de esta actividad, siendo en promedio el 13% anual durante los últimos 27 años, crecimiento que se ha destacado especialmente en el campo de la mediana y pequeña piscicultura. La actividad ha ido reemplazando la producción pesquera nacional de extracción o captura, al punto que en el año 2011 representó el 51,4% de la producción pesquera total, lo cual posiciona al país en el sexto lugar en orden de importancia de la piscicultura en América Latina [3].
Una de las principales actividades dentro de la acuicultura es la cría y producción de alevines, nombre con que se denomina a las crías recién nacidas de peces durante las primeras semanas de vida y hasta que alcancen una determinada talla dependiendo de la especie a la cual pertenecen. Esta actividad comprende diferentes etapas, dentro de las que se destacan la reversión de sexo, proceso mediante el cual se espera obtener la mayor cantidad posible de alevines macho, forzando la reversión sexual a partir de una hormona especializada, dosificada durante un determinado tiempo con base en el número de alevines a los cuales se le suministra. En la etapa de engorde, los alevines son trasladados a estanques dentro de los que es indispensable determinar la densidad poblacional, para el correcto suministro de alimento y control de variables de calidad del agua como pH, oxígeno, dióxido de carbono y amonio. Finalmente, la comercialización de alevines es realizada tradicionalmente por la cantidad solicitada, evidenciándose dentro de los procesos de producción piscícola, la gran importancia que tiene el conteo de alevines.
Los peces pueden ser confinados en estanques de tierra, piscinas de hormigón, barricadas en aguas costeras o jaulas suspendidas en aguas abiertas. En estas situaciones, los peces pueden ser suministrados de alimentos y protegidos de muchos depredadores naturales [4]. Uno de los mayores problemas en la piscicultura es la ineficiencia del sistema para alimentar a los peces, el exceso de alimentos contribuye a un efecto ambiental negativo, dado que la contención de todos estos residuos es muy difícil, los desechos se dispersan fácilmente en el agua circundante, contaminando así el medio ambiente de los peces [5].
Para la explotación comercial de alevines existen diferentes técnicas de conteo las cuales son: conteo de forma manual, el cual cosiste en contar los peces uno a uno pasándolos de un recipiente a otro, por volumen en seco, en el cual con ayuda de un elemento de medida con volumen conocido, se logra sacar una relación volumen-cantidad de alevines, por volumen en agua, en el cual se relaciona el volumen de agua desplazada con el número de alevines en un recipiente graduado y el método gravimétrico en el cual con la ayuda de una balanza electrónica y recipientes secos se logra encontrar una relación entre el peso en seco y el número de animales. Los métodos expuestos a excepción del conteo de forma manual presentan una desventaja que les disminuye precisión al momento de determinar la cantidad exacta de alevines, debido a que no se puede garantizar un tamaño homogéneo de los peces dentro de la población. Estos métodos de conteo presenten generalmente un error considerable y pueden ocasionar algún tipo de lesiones o enfermedades en los alevines debido a la manipulación directa que se realiza durante el procedimiento. Otro sistema de conteo es presentado en [6], donde se desarrolla un dispositivo electrónico a partir de un sensor infrarrojo, como herramienta para detectar y contabilizar el número de alevines de tilapia roja que cruzan a través de un conducto. Esta implementación presenta un error común de los sensores optoelectrónicos, que impiden diferenciar el paso de varios objetos sobrepuestos, teniendo como requisito de funcionamiento que se presente un espacio entre cada alevín censado y el siguiente, permitiendo que el sensor genere las señales correctas. Los mismos autores del presente artículo, hicieron una propuesta en [7], pero en el cual se tenía dependencia de un computador para el procesamiento de las imágenes y no se tenía aislamiento de la luz externa, los resultados fueron positivos, pero aún se requería mejorar estos aspectos, incluyendo el costo y portabilidad del equipo.
En el presente artículo se muestran los resultados obtenidos con el diseño e implementación de un sistema automático de conteo de alevines de Tilapia Roja, usando técnicas de visión artificial mediante las cuales se realiza la adquisición de imágenes por medio de una cámara web de alta definición, se aplican métodos de preprocesamiento y procesamiento de imágenes para obtener la información requerida y finalmente se determina y visualiza la cantidad de alevines a través de una interfaz gráfica de usuario. El sistema es desarrollado con un dispositivo electrónico compacto y de bajo costo, para brindar una alternativa práctica y eficiente a los métodos manuales usados tradicionalmente.
2. MATERIALES Y METODO
La visión artificial es una técnica no invasiva que permite, entre otras, hacer un procesamiento rápido de imágenes o videos para obtener características propias de diferentes objetos, bien sean inertes o vivos. En el caso de la piscicultura, en [8] se utiliza esta técnica para determinar la frescura de los peces, a partir de segmentación, aumento de contraste, umbralización adaptativa y detección de contornos. En [9] se hace una completa revisión de diferentes sensores para detectar características de calidad en autenticación de alimentos, a partir de una nariz y lengua artificial, y también un sistema de visión computacional que haría las veces de un ojo artificial. En [10] se hace una selección de atunes vivos en movimiento sin intervención humana, para determinar tamaño, forma y orientación, discriminando si son de esta especie o son otro tipo de residuo en el agua. En [11] se hace una propuesta de algoritmo para contar huevos de peces vivos de forma no invasiva; la dificultad radica en su transparencia, lo que hace que a partir de imágenes represente retos de técnicas de visión artificial, para evitar manipulación que otros métodos realizan y lo cual afecta y mata los huevos; los resultados arrojan un error del 6%.
A partir del análisis anterior, se concluye que la visión artificial ha sido usada últimamente en diferentes investigaciones para el sector agroindustrial, específicamente en la acuicultura para hacer diferentes análisis, entre ellos el conteo que regularmente tiene consecuencias negativas o bien es difícil de hacer de forma manual. El desarrollo de un sistema automático para el conteo de alevines, tiene como objetivo, el diseño y construcción de un dispositivo que permita detectar y contabilizar, el paso de alevines a través de un conducto implementando técnicas de visión artificial, incrementando la eficiencia, productividad y calidad dentro de los procesos piscícolas y disminuyendo los errores propios de realizar procesos monótonos y repetitivos de forma manual. La metodología utilizada, consiste en la implementación de técnicas de visión artificial, comenzando con la adquisición de imágenes, el preprocesamiento por medio de la segmentación, para simplificar la representación de las imágenes y obtener otras más significativas, el procesamiento para determinar los objetos o características de interés y finalmente el análisis para obtener los resultados deseados.
2.1 Estructura del dispositivo
La estructura del dispositivo automático de conteo de alevines, está constituida principalmente por un sistema de flujo en tubería de PVC, con una base metálica en forma de trípode para brindar estabilidad, que permite variar el ángulo de inclinación horizontal del conducto de flujo, con el objetivo de permitir aumentar o disminuir la velocidad de descenso de los peces. En la parte interna del conducto de flujo, se encuentra instalada la iluminación del sistema, además de un recubrimiento en lona sintética impermeable blanca dentro del rango visible de la ubicación de la cámara, esto con el propósito de garantizar un fondo de color homogéneo que permita el máximo contraste de color con respecto a los alevines. Todos los materiales usados para la construcción del conducto y dispositivo en general, son de bajo costo, duraderos y resistentes al agua, para proporcionar una larga vida útil del dispositivo (Fig.1).

Fig. 1. Estructura del dispositivo con base en forma
de trípode y conducto de flujo de alevines
2.2 La iluminación
El sistema de iluminación, es una parte fundamental en el desarrollo de aplicaciones con visión artificial, permitiendo realizar una adquisición de imágenes adecuada, para facilitar el posterior procesamiento de las mismas. La correcta selección e implementación del sistema de iluminación, debe garantizar la mínima formación de reflejos y sombras sobre los objetos de interés, obteniendo una distribución homogénea de la luz y evitando que las condiciones internas de iluminación, se vean afectadas por perturbaciones ambientales externas.
El sistema utilizado para la construcción del dispositivo, proporciona un suministro de iluminación difusa, que se distribuye de manera uniforme en el interior del conducto. La implementación del sistema de iluminación (Fig.2) se realizó a partir de dos segmentos de cinta LED blanca, con una longitud de 20 centímetros cada uno, ubicados en el contorno interior del conducto, separados por una distancia de 35 centímetros de modo que queden por fuera del rango de visión de la cámara.

Fig. 2. Distribución del sistema de iluminación LED
Para determinar la efectividad y correcto funcionamiento del sistema de iluminación implementado en el dispositivo, con el objetivo de evitar perturbaciones generadas por el medio ambiente en el cual se use el equipo, se realiza la validación del mismo, con el fin de garantizar resultados constantes del conteo. Por medio del software LabVIEW [12], se obtiene el histograma de varias imágenes con distintas condiciones ambientales, se realizan las pruebas en cuatro entornos de iluminación externa; día soleado, día nublado, iluminación artificial moderada y oscuridad total. A partir de las imágenes adquiridas, se realizó la comparación de los valores de color RGB, entregados por la distribución de los respectivos histogramas, buscando la proporción de cambio de valores con respecto a cada una de las condiciones ambientales de iluminación.
Un histograma representa una curva, donde se grafica la distribución en frecuencia de cada color RGB de los pixeles presentes en una imagen, ubicando en uno de los ejes del plano el valor de nivel de color y en el otro eje, la proporción en que dicho color se encuentra en la imagen.
Una imagen utilizada para realizar las pruebas del sistema de iluminación (Fig. 3), conformada por tres objetos de diferente color para obtener diversos valores de distribución del histograma, en el eje horizontal se ubica el tono de color RGB de 0-255 y en el eje vertical la frecuencia en que se presenta cada tono en la distribución de pixeles en la imagen.
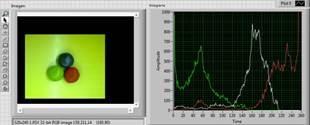
Fig. 3. (a) Imagen de prueba para el sistema de
iluminación, con fotografía de tres objetos de color.
(b) Histograma RGB de la imagen obtenido con
LABVIEW.
A partir de los datos obtenidos con los histogramas de las imágenes, se determinó que la distribución de colores no presentó variaciones significativas de los valores propios de cada imagen de prueba, se utilizaron como base de referencia para el análisis, las imágenes correspondientes a las dos condiciones de iluminación más extremas, oscuridad total y día soleado (Tabla 1).
Tabla 1. Distribución en frecuencia de los valores promedio RGB obtenidos por los histogramas
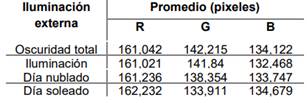
Los porcentajes de cambio presentados en el espectro RGB entre estas condiciones son: R=0.73%, G=5.84% y B=0.41%, valores que pueden ser considerados despreciables dentro del correcto funcionamiento del equipo, resultado que permitió concluir, que la implementación del sistema de iluminación del dispositivo, es apropiada para su correcto funcionamiento, aísla adecuadamente la luz externa y cumple con los requerimientos del sistema.
2.3 Visión artificial y OpenCV
La visión artificial es una disciplina que engloba todos los procesos y elementos que proporcionan ojos a una máquina y se podría decir que: la visión artificial o comprensión de imágenes describe la deducción automática de la estructura y propiedades de un mundo tridimensional, posiblemente dinámico, bien a partir de una o varias imágenes bidimensionales de ese mundo. Algunas aplicaciones buscan evaluar propiedades geométricas de objetos como la forma, tamaño y localización [13].
La imagen adquirida en primer lugar es preprocesada para adaptarla a unas condiciones óptimas, entre las operaciones posibles dentro de este procesamiento puede encontrarse la eliminación de ruido, la reducción de la saturación o la segmentación de la imagen. Una vez procesada, es el momento de obtener las características deseadas aplicando diferentes algoritmos según las necesidades. Por último, se clasifica e interpreta el resultado, es aquí donde aparece el proceso de aprendizaje del sistema [14].
OpenCV [15] es una biblioteca de procesamiento de imágenes creada por Intel, se puede descargar libremente y está disponible para programar en lenguajes C, C++, Java y Python, siendo compatible con los sistemas operativos de Windows, Linux, Mac OS, IOS y Android más recientes, es de código abierto, fácil de utilizar y se encuentra optimizado para diseñar un gran número de aplicaciones en tiempo real [16]. La librería contiene más de 500 funciones que abarcan muchas áreas de la visión por computador. La licencia de código abierto para OpenCV se ha estructurado de tal manera que se puede construir un producto comercial utilizando la totalidad o parte de la librería. En parte debido a estas condiciones de licencia libre, hay una gran comunidad de usuarios que incluye a personas de grandes empresas (IBM, Microsoft, Intel, Sony, Siemens, Google, entre otras) y los centros de investigación (Stanford, MIT, CMU, Cambridge, e INRIA) [17]. Desde que apareció la primera versión de OpenCV en el año 1999, se ha utilizado en infinidad de aplicaciones, desde sistemas de seguridad con detección de movimiento, hasta programas de control de procesos donde se requiere reconocimiento de objetos.
Python es un lenguaje de programación poderoso y fácil de aprender. Cuenta con estructuras de datos eficientes y de alto nivel y un enfoque simple pero efectivo a la programación orientada a objetos. La elegante sintaxis de Python y su tipado dinámico, junto con su naturaleza interpretada, hacen de éste un lenguaje ideal para scripting y desarrollo rápido de aplicaciones en diversas áreas y sobre la mayoría de las plataformas [18].
2.4 El hardware
Para la implementación y correcto funcionamiento de un sistema de visión artificial, es de gran importancia contar con un hardware de procesamiento potente, que cumpla con las tareas requeridas y en este caso, que sea de bajo costo para garantizar que la construcción final del dispositivo presente un valor accesible.
El procesador seleccionado para la implementación del dispositivo de conteo de alevines, es un ordenador de placa reducida conocido como Raspberry Pi. Desarrollado bajo el sistema operativo Linux como unidad de cómputo sin periféricos, versátil, compacto y de bajo costo. La cámara que se utilizó para el desarrollo del presente proyecto, es una Webcam Auka con resolución de captura de imagen hasta 1280x768 y grabación de video hasta 30fps, interfaz de conexión USB 2.0 que permite su fácil instalación con diferentes dispositivos. La adquisición de imágenes se realizó con la cámara ubicada en la parte superior del conducto, posicionada de manera perpendicular con respecto a la dirección de flujo de los alevines. En conjunto con la tarjeta Raspberry y la cámara, también se utiliza una pantalla táctil de 7”, integrada al dispositivo para el control de las funciones del equipo y visualización de los resultados a través de una interfaz gráfica de usuario. La alimentación de estos componentes se realiza por medio de la red eléctrica de 110VAC, a la cual se conectaron adaptadores de 5 y 12VDC. Todos los componentes de hardware fueron ubicados en el interior de una caja que permite su adecuada distribución y cuidado (Fig. 4).
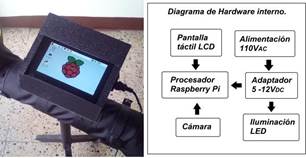
Fig. 4. (a) Caja que contiene el hardware del
dispositivo. (b) Distribución y conexión interna de
componentes
2.5 El algoritmo
El algoritmo implementado para el conteo de alevines, está conformado por cuatro etapas básicas, la adquisición, el preprocesamiento, el procesamiento y análisis de resultados. Adquisición de imágenes. Es la parte más importante de la clasificación, ya que representa la materia prima para el procesamiento de la imagen que logra obtener un reconocimiento exitoso o fallido. Un factor importante a tener en cuenta, es que se debe adecuar el área de captura para la imagen, con el propósito de evitar interferencia de reflejos y cambios de iluminación del ambiente, para el posterior procesamiento de la imagen [19]. La imagen original sin procesamiento es el primer paso para empezar a realizar un tratamiento adecuado e identificar las siguientes etapas (Fig. 5)

Fig. 5. Imagen de alevín adquirida con la cámara,
sin ningún tratamiento o modificación
Preprocesamiento de imágenes: El objetivo principal de esta etapa es obtener algoritmos que mejoren la calidad de las imágenes que se desean analizar, resaltando ciertas características de interés propias de la imagen y eliminando o reparando todos aquellos desperfectos producidos por el hardware durante la adquisición. En un proceso de visión artificial estos algoritmos tienen que ser utilizados lo menos posible, un uso excesivo de ellos repercutirá en el tiempo de proceso total e indicará que la calibración, iluminación y selección de los elementos de la etapa de adquisición no ha sido la adecuada [13].
Esta primera etapa realiza tres procesos principales: redimensión, conversión del espacio de color y delimitación de regiones de interés. Los procesos de conversión de espacio de color y filtrado llevan más tiempo de cálculo cuanto mayor es el tamaño de la imagen [20].
La primera acción dentro de esta etapa, consiste en recortar la imagen adquirida, con el objetivo de eliminar ciertas zonas que no contienen información de interés, o en algunos casos, que aportan datos que pueden ocasionar errores. La segunda acción corresponde a un cambio del formato de color de la imagen, pasando del color RGB a la escala de grises, siendo posible realizar esta acción, debido a que en este proyecto no fue necesario tener en cuenta, características de los alevines directamente relacionadas con su color, por tanto es suficiente para obtener los datos deseados, además, permitió utilizar un formato de color más compacto, que ayudo a mejorar el tiempo de ejecución del algoritmo y la carga computacional del procesador. La tercera y última acción aplicada en esta etapa es la umbralización, con la cual se eliminan los valores de los pixeles de una imagen que se encuentren por fuera de los límites establecidos del umbral, obteniendo una imagen binaria. Este operador de umbral cambia los valores de los pixeles de la imagen, dependiendo del cumplimiento de una condición representada por la siguiente ecuación, en donde q es el nuevo valor del pixel, p el valor actual y u el valor del umbral.
![]()
Los resultados de la imagen después de aplicarse estas 3 acciones, se presentan en la Fig. 6.

Fig. 6. (a) Imagen recortada. (b) Imagen con
cambio de formato de RGB a escala de grises. (c)
Imagen binaria
Procesamiento de imágenes: Esta etapa dentro del algoritmo de visión artificial, tiene por objetivo, resaltar las características de interés en los objetos, permitiendo distinguir con mayor claridad, aquellos aspectos de la imagen que son importantes para el análisis de resultados. Comúnmente se utilizan transformaciones morfológicas que cambian o mejoran la forma y estructura de los objetos, para obtener contornos primarios, descomponer formas complejas en formas más simples, reconstruir elementos distorsionados, entre otros [13].
En esta etapa se aplicó en la imagen binaria, una acción de dilatación que logra unir todas las líneas discontinuas y resalta los contornos de los objetos presentes. De forma matemática, a partir de una imagen binaria A y un elemento binario B, en donde el primer elemento de la dilatación A, está asociado con la imagen que se está procesando y el segundo recibe el nombre de elemento estructural, la forma que actúa sobre A en la dilatación para producir la transformación.
![]()
Para finalmente realizar el conteo de los alevines se determinan los contornos de los objetos de interés en la imagen, tomando como base, un rango de área en pixeles máximo y mínimo en cada objeto detectado, la selección de este rango, permitió determinar un tamaño promedio en pixeles para los alevines, logrando omitir dentro del conteo algunos objetos demasiado pequeños, como basura o impurezas en el agua, de igual forma, se aplicó una relación matemática respecto a dicho tamaño promedio, para determinar los instantes en los que un objeto demasiado grande, es equivalente a varios alevines sobrepuestos y poder realizar el ajuste en el conteo (Fig. 7).
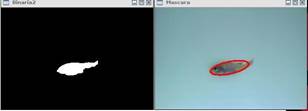
Fig. 7. (a) Imagen dilatada. (b) Detección del
contorno de un alevin
Análisis de imágenes: Consiste en determinar los parámetros apropiados y necesarios para el análisis, los cuales corresponden a las características de cada uno de los objetos. La característica principal que se desea obtener en este caso, es la cantidad de alevines. Para establecer el número de alevines presentes en la imagen, se realizó el conteo del número de contornos de objetos detectados, de esta forma, cada contorno que cumpla una condición de área mínima corresponde a un alevín.
Una vez obtenida la cantidad de alevines presentes en cada imagen, es necesario garantizar dentro de la estructura del algoritmo, que nunca se realicen conteos repetidos de peces, es decir, que los alevines detectados y contabilizados en una imagen, no sean contados nuevamente en la siguiente. Para realizar el incremento del conteo se utiliza una variable, correspondiente a la cantidad de alevines presentes en la imagen actual, en conjunto con otra variable, que representa la cantidad de alevines en la imagen anterior, establecidos los valores de ambas variables, se utiliza una sentencia de comparación para determinar cuándo se permite o no, el aumento de la cantidad de peces, esto significa, cuando no se incrementa la cantidad, se debe a que hubo una constancia o disminución de los contornos detectados en la imagen actual con respecto a la anterior, en consecuencia, cuando se incrementa la diferencia respectiva de ambas variables, es debido a que la cantidad de contornos actuales es superior a la anterior, representando que nuevos alevines se encuentran presentes en la imagen.
Por último, se diseña una interfaz gráfica utilizando la pantalla táctil usando la herramienta Tkinker [21]. Ésta permite visualizar en cada momento la cantidad de alevines detectados y algunas funciones básicas como inicio del conteo, limpiar el contador numérico restableciéndolo a cero, reiniciar el sistema, ingresar a las configuraciones de la tarjeta Raspberry y apagar el dispositivo.
3. RESULTADOS
Los resultados se obtuvieron a partir de varios análisis realizados: inclinación adecuada, precisión en el conteo y comparación de tiempo versus otros métodos.
3.1 Análisis de inclinación
El diseño estructural del dispositivo, permite variar el ángulo de inclinación del conducto de flujo de alevines con respecto a la horizontal de su ubicación. Esta característica, permite regular la velocidad descendente de los alevines a través del dispositivo, con el objetivo de evitar que su velocidad durante el recorrido sea tan elevada, que la capacidad de adquisición de la cámara no sea suficiente para detectar el paso de los peces, o tan baja para impedir que completen su recorrido por el interior del conducto. A su vez también es útil para ubicar el dispositivo en terrenos irregulares típicos de granjas piscícolas.
La correcta selección del ángulo de inclinación, permite adaptar de forma eficiente el desempeño de la cámara en el sistema de visión artificial, para esto, se utiliza un alevín como muestra para determinar la inclinación más apropiada para el dispositivo. Se hicieron una serie de pruebas en las cuales se deposita 20 veces consecutivas el mismo alevín a través del conducto de flujo, mientras se modifica el ángulo de inclinación, verificando que el pez complete la totalidad del recorrido y sea detectado por el algoritmo (Tabla 2).
Tabla 2: Pruebas para determinar el ángulo de inclinación del dispositivo
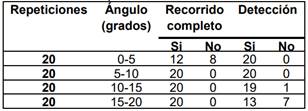
Las pruebas realizadas determinan que una inclinación inferior a 5°, disminuye considerablemente la velocidad de flujo e impide que los alevines desciendan completamente por el conducto, al menos en un 40% de las repeticiones, mientras que para inclinaciones superiores a 15°, la velocidad de descenso aumenta demasiado, impidiendo que en el 35% de las oportunidades el alevín sea detectado. Un ángulo de inclinación en un rango entre 5° y 15° presenta el mejor desempeño del dispositivo, en donde todos los alevines completan el recorrido por el conducto y aproximadamente en el 100% de las pruebas son detectados de forma correcta.
3.2 Validación del conteo
Las pruebas del método de conteo automático implementado, se realizaron con una población de 50 alevines de tilapia roja, los cuales son depositados a través del equipo 60 veces consecutivas (Tabla 3). En cada una de las pruebas se calcula el error relativo en porcentaje y se determina el valor promedio de dicho error, con el objetivo de tener una visión más global del grado de confiabilidad que brinda el método de conteo implementado con el dispositivo.
Tabla 3. Pruebas para determinar el error relativo del dispositivo
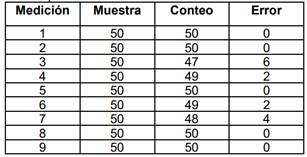
Los resultados obtenidos con este procedimiento, entregan valores estables y con variaciones leves, presentando un error relativo en porcentaje para el
valor de cada uno de los conteos obtenidos, finalmente el error promedio que presenta el dispositivo en condiciones de funcionamiento es de 1.9%. Se analizó la secuencia de video del conteo para determinar una posible disminución del error y se determinó que algunos alevines no eran detectados por la cámara, al pasar con una velocidad superior a los demás y por fuera de la capacidad de adquisición de imágenes de 30fps.
3.3 Análisis de tiempos
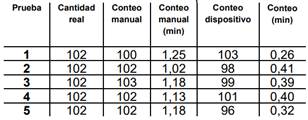
Finalmente se realiza una prueba de velocidad de conteo del dispositivo, con el objetivo de determinar el tiempo empleado por este, para llevar a cabo el conteo de una cantidad conocida de alevines con respecto al método manual y determinar sus ventajas. Para esto se utilizó una muestra de 102 peces, contados de forma manual por un operario capacitado y se contabiliza el tiempo transcurrido durante el proceso, después, se emplea el dispositivo automático de conteo para ejecutar la misma acción y se contabiliza nuevamente el tiempo empleado. Este procedimiento se repite en varias ocasiones para obtener una relación con respecto a los tiempos de conteo de alevines generados por ambos métodos (Tabla 4).
Las pruebas de velocidad de funcionamiento realizadas en el dispositivo en comparación con el método de conteo manual, presentan valores de tiempo constantes para el conteo de una cantidad fija de alevines por ambos métodos. El tiempo empleado por un operario capacitado para realizar el conteo total de 102 peces, es en promedio de 1 minuto con 15 segundos, mientras que el tiempo empleado por el dispositivo automático desarrollado, para realizar la misma acción, es en promedio de 36 segundos. Estos resultados permiten establecer, que el tiempo de conteo de alevines requerido con la implementación del sistema, disminuye aproximadamente en un 50% con respecto al tiempo empleado con el método de conteo manual.
Tabla 4. Pruebas para determinar la velocidad de funcionamiento del dispositivo
4. CONCLUSIONES
El diseño del conducto de flujo de alevines para el desarrollo del dispositivo automático de conteo, se realizó teniendo en cuenta algunas necesidades y requerimientos indispensables, identificados a partir de la información relacionada con piscicultura. Es fundamental garantizar el flujo continuo de peces a través de un espacio cerrado, que permita la implementación de un sistema de iluminación apropiado y la correcta ubicación de la cámara. Esto permite disminuir el contacto manual con los alevines, que es uno de los principales problemas en los métodos de conteo tradicionales, al perjudicar la salud y calidad de los peces con el contacto directo, además, brinda la posibilidad de pasar los alevines de un recipiente a otro de una forma rápida y segura. Discusión (o análisis de resultados) también pueden ser combinadas.
Con la implementación y desarrollo de un algoritmo de visión artificial, es posible obtener características propias de los objetos de interés presentes en la imagen, como su color, forma, cantidad y ubicación. De esta forma, se puede determinar el número de alevines que cruzan por el rango de visión de la cámara. El uso de este tipo de aplicaciones para el desarrollo de sistemas automatizados, proporciona una gran versatilidad para la medición de diferentes características, permitiendo sustituir el uso de dispositivos optoelectrónicos como sensores infrarrojos, utilizados para el conteo y detección de objetos en otros trabajos de investigación, pero con las limitaciones propias de estos componentes.
Factores determinantes como la iluminación, el color de fondo en la imagen y el contraste generado con los objetos de interés, la velocidad de adquisición y ubicación de la cámara y la capacidad de procesamiento del dispositivo, deben ser analizados e implementados de forma correcta, ya que el sistema de visión artificial funciona como un conjunto y como tal, debe ser desarrollado para su correcto funcionamiento. Los parámetros del sistema de visión artificial son propios y corresponden a las condiciones específicas en que se programa el algoritmo, el modificar una sola de estas condiciones, implica realizar un nuevo ajuste del algoritmo para lograr una correcta adaptación del dispositivo.
La implementación del método de conteo desarrollado con el dispositivo con un error inferior al 2%, permite la automatización eficiente del procedimiento realizado de forma manual en el sector piscícola, el cual comúnmente arroja errores superiores al 5%, disminuyendo además a la mitad el tiempo empleado para ejecutar dicho proceso, permitiendo realizar un conteo aproximado de 1000 alevines en 5 minutos, además, se eliminan los errores humanos que proporcionaba la acción monótona y repetitiva, como por ejemplo, la fatiga y problemas de concentración que ocasiona el conteo continuo de grandes volúmenes de alevines.
5. AGRADECIMIENTOS
A la dirección de investigación y posgrados por la financiación del proyecto “Diseño e implementación de un sistema automático de conteo y determinación de peso y tamaño de alevines de tilapia roja, utilizando técnicas de visión artificial implementadas por medio de un dispositivo electrónico portátil y de bajo costo” con recursos institucionales del Politécnico Colombiano Jaime Isaza Cadavid, con lo cual fue posible la obtención de los resultados presentados en este artículo. Al centro de innovación y negocios Ruta N y Colciencias, que a través del programa de fondo de fomento a la protección año 2016 acogieron el presente desarrollo y apoyaron los trámites para la solicitud de patente NC2016/0005782 que se radicó ante la Superintendencia de Industria y Comercio el 26/27/2016, y además actualmente están apoyando el alistamiento comercial de la invención.
6. TRABAJO FUTURO
Teniendo en cuenta los resultados obtenidos con el presente proyecto, se propone como trabajos futuros, realizar la implementación de un sistema de bombeo de agua, que permita trasladar los alevines de forma automática entre dos recipientes para realizar el conteo. También se podría implementar el sistema con una cámara infrarroja y con mayor velocidad de adquisición de imágenes en video, por ejemplo a 60fps, con el objetivo de eliminar el sistema de iluminación y poder determinar características adicionales de los alevines como peso, tamaño, especie, enfermedades en la piel, entre otras.
7. REFERENCIAS BIBLIOGRÁFICAS
[1] Ricardo García, Luz Gutiérrez, and Carlos David, "El uso de los probióticos en la industria acuícola. Artículo de," Alimentos Hoy, pp. 165-178, 2015.
[2] Yinet Parrado, "Historia de la Acuicultura en Colombia," AquaTIC, pp. 60-77, 2012.
[3] María Merino, Sara Bonilla, and Fernando Bages, "Diagnóstico del estado de la Acuicultura en Colombia," Bogotá, 2013.
[4] Jer-Vui Lee et al., "The Use of Vision in a Sustainable Aquaculture Feeding System," Research Journal of Applied Sciences, Engineering and Technology 6(19), pp. 3658-3669, 2013.
[5] C Cho and D Bureau, "A review of diet formulation strategies and feeding systems to reduce excretory and feed wastes in aquaculture.,"Aquac, pp. 349-360, 2001.
[6] A Navarro, E García, E Inzunza, C Liera, and O López, "Sistema automático para conteo de peces utilizando sensores infrarrojos y comunicación inalámbrica," in Congreso Internacional en Ingeniería Electrónica, 2014, pp. 176-181.
[7] Rubén Vásquez, Ahmed Alejandro Cardona, and Leidy Yohana Ocampo, "Propuesta de sistema de conteo de alevines de tilapia roja de bajo costo usando técnicas de visión artificial," Revista Politécnica, no. 21, pp. 85-95, Julio-Diciembre 2015.
[8] Isaac Ashish, Kishore Malay, and Sarkar Biplap, "Computer vision based method for quality and freshness check for fish from segmented gills," Computer and electronics in Agriculture, no. 139, pp. 10-21, 2017.
[9] Ambra Di Rosa, Francesco Leone, Federica Cheli, and Vincezco Chiofalo, "Fusion of electronic nose, electronic tongue and computer vision for animal source food authentication and quality assessment: A review," Journal of Food Engineering, no. 210, pp. 62-75, 2017.
[10] Vicente Atienza, Gaberiela Andreu, Fernando López, José Valiente, and Vicente Puig, "Visionbased discrimination of tuna individuals in grow-out cages through a fish bending model," Computers and Electronics in Agriculture, no. 130, pp. 142-150,2017.
[11] Yane Duan et al., "An automatic counting system for transparent pelagic fish eggs based on computer vision," Aquacultural Engineering, no. 67, pp. 8-13, 2015.
[12] National Instruments. (2017, Junio) LabVIEW - National Instruments. [Online]. http://www.ni.com/es-cr/shop/labview.html [13] Ana González et al., Técnicas y Algoritmos Básicos de Visión Artificial. La Rioja: Universidad de la Rioja, 2006.
[14] Jorge Fuentes, Abraham Navalón, Antoni Reolid, and David Varón, "Visión Artificial Aplicada al Control de la Calidad," 3C Tecnología, pp. 297- 308, 2014.
[15] OpenCV Team. (2017, Junio) OpenCV. [Online]. http://opencv.org/
[16] Krupali Mistry and Avneet Saluja, "An Introduction to OpenCV using Python with Ubuntu," International Journal of Scientific Research in Computer Science, Engineering and Information Technology, pp. 65-68, 2016.
[17] Gary Bradski and Adrian Kaehler, Learning OpenCV. Wisconsin: O´Reilly, 2008. [18] Guido Van Rossum. (2009, Septiembre) Python. [Online]. http://docs.python.org.ar/tutorial/pdfs/TutorialPython 2.pdf
[19] Alvaro Romero, Alejandro Marín, and Jovani Jiménez, "Sistema de clasificación por visión artificial de mangos tipo Tommy," UIS Ingenierías, p. 14, 2015.
[20] José Suárez, Luis Solis, Rodrigo Castañeda, José Ortiz, and Hamurabi Gamboa, "Algoritmo de procesamiento digital," Revista Electrónica de Ingeniería y Tecnologías, 2017.
[21] Python Software Foundation. (2017, junio) Graphical User Interfaces with Tk - Python v3.0.1 documentation. [Online]. https://docs.python.org/3.0/library/tk.html